驅動電路採用H型橋式PWM脈寬調製驅動形式,如圖3-1所示。電路主要由大功率三極體B772、D882、三極體8050和光電耦合器等元件組成。該驅動電路可控制電機的正轉、反轉和停止。與單片機的介面電路採用光電耦合器隔離。用單片機的I/O口控制驅動電路的兩個控制端,當控制端PWM1為低電平,控制端PWM2為高電平時,左邊的光電耦合器導通,右邊的光電耦合器不導通,Q1、Q2、Q6、Q7全部深度飽和導通,而右邊的Q3、Q4、Q5、Q8全部截止,由於Q6、Q7深度飽和導通,所以其Vceo只有約0.3伏,在驅動管上消耗的電壓很小,此時電機正轉。反之,當控制端PWM1為高電平,控制端PWM2為低電平時,電機反轉。當控制端PWM1和PWM2同時為高電平或低電平時,電機停止。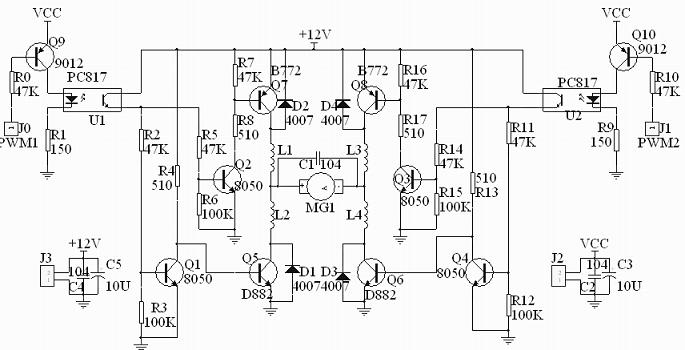
圖E-3-1 H型橋式PWM脈寬調製驅動電路
由於電機平均功率滿足如下關係:
其中, P為電機兩端的平均功率; Pmax為電機全速運轉時的功率; A為脈寬。可見,電機的平均功率與脈寬成正比。
設電機轉動后的平均功率為: P=fv
則 APmax=Af=fv
式中 v=Avmax
其中, f為拉力, vmax為電機全速運轉時的速度。
可見電機的轉速與脈寬成正比。單片機發出的脈衝信號的占空比決定PWM放大器輸出的電壓平均值的大小。
電路部分參數的計算(以左支路為例進行分析):
H橋路設計的關鍵是要讓四個功率管始終工作在飽和或者截止狀態下,因此在電路設計時,在功率管(如Q7)前加一級三極體(如Q2)驅動,使得當Q7工作時能處在飽和狀態,不工作時則處於截止狀態。
當功率管Q7工作在深度飽和狀態(Ic1=3A電流時),查得B772與D882的電流放大倍數β1≈100 ,此時其基極電流:
因此驅動三極體Q2隻需要提供30mA的電流,由於Q2的放大倍數 β2≈100 ,Q2的基極電流:
由於光電耦合器導通時,接收管的導通電流有50mA 0.3mA,足以使Q2深度飽和。而當Q2不工作時,其Iceo很小,足以使Q7截止。在重負載導通時,功率管7c-e間的電壓只有0.2V,即三極體處於深度飽和狀態,故該電路的實際效率很高。同理,右支路的參數分析以及工作狀態與左支路相同。
[admin via 研發互助社區 ] 電機驅動模塊的電路設計與實現已經有4068次圍觀
http://cocdig.com/docs/show-post-44596.html
