Pt100 溫度感測器為正溫度係數熱敏電阻感測器,主要技術參數如下:
另外,Pt100 溫度感測器還具有抗振動、穩定性好、準確度高、耐高壓等優點。
鉑熱電阻的線性較好,在0~100 攝氏度之間變化時,最大非線性偏差小於0.5 攝氏度。
圖1 PT100 感測器封裝圖
應用領域
寬範圍、高精度溫度測量領域。如:
常用電路圖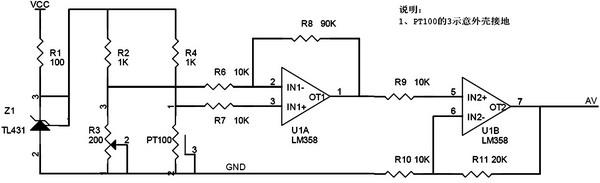
R2、R3、R4 和Pt100 組成感測器測量電橋,為了保證電橋輸出電壓信號的穩定性,電橋的輸入電壓通過TL431 穩至2.5V。從電橋獲取的差分信號通過兩級運放放大后輸入單片機。電橋的一個橋臂採用可調電阻R3,通過調節R3 可以調整輸入到運放的差分電壓信號大小,通常用於調整零點。
放大電路採用LM358 集成運算放大器,為了防止單級放大倍數過高帶來的非線性誤差,放大電路採用兩級放大,如圖 5.1 所示,前一級約為10 倍,后一級約為3倍。溫度在0~100 度變化,當溫度上升時,Pt100 阻值變大,輸入放大電路的差分信號變大,放大電路的輸出電壓Av 對應升高。
注意:雖然電橋部分已經經過TL431 穩壓,但是整個模塊的電壓VCC 一定要穩定,否則隨著VCC 的波動,運放LM358 的工作電壓波動,輸出電壓Av 隨之波動,最後導致A/D 轉換的結果波動,測量結果上下跳變。
鉑熱電阻阻值與溫度關係為:
式中,A=0.00390802;B=-0.000000580;C=0.0000000000042735。可見Pt100 在常溫0~100攝氏度之間變化時線性度非常好,其阻值表達式可近似簡化為:RPt=100(1+At),當溫度變化1 攝氏度,Pt100 阻值近似變化0.39 歐。
Pt100 的分度表(0℃~100℃)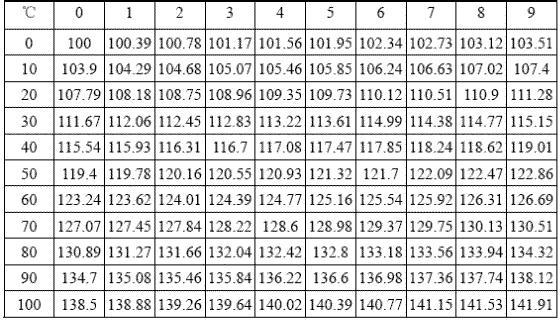
程序處理
一般在使用PT100 的溫度採集方案中,都會對放大器LM358 採集來的模擬信號AV進行溫度採樣,即進行A/D 轉換。
A/D 處理包括兩方面內容,一是A/D 值的濾波處理,二是A/D 值向實際溫度轉換。由於干擾或者電路雜訊的存在,在採樣過程當中會出現採樣信號與實際信號存在偏差的現象,甚至會出現信號的高低波動,為了減小這方面原因造成的測量誤差,在實際採樣時採樣18 個點,然後再除去其中偏差較大的兩個點,即一個最大值和一個最小值,再對剩餘的16 個點取均值,這樣得到的A/D 轉換結果比較接近實際值。
在對數值進行濾波操作之後,還要將A/D 值轉換為溫度,常用的兩種方法為查表法和公式法:查表法比較麻煩,而且精度也不高,適合於線性化較差的NTC 溫度感測器;公式法比較簡單,只需要確定比例係數K 和基準偏差B 即可,適合於線性化較好的感測器
溫度轉換的C 語言實現過程為:
fT = (ADC_data * K) – B; //換算成溫度值。
得到溫度后,一般還會對被控對象根據實際溫度和目標溫度進行實時的控制,要又要設計到控制演算法,如:模糊控制、PID 調節等。這裡簡單介紹一下PID 控制原理,更多內容請察看相關書籍。
PID 工作原理
PID(Proportional Integral Derivative)控制是控制工程中技術成熟、應用廣泛的一種控制策略,經過長期的工程實踐,已形成了一套完整的控制方法和典型的結構。它不僅適用於數學模型已知的控制系統中,而且對於大多數數學模型難以確定的工業過程也可應用,在眾多工業過程式控制制中取得了滿意的應用效果。
由於來自外界的各種擾動不斷產生,要想達到現場控制對象值保持恆定的目的,控制作用就必須不斷的進行。若擾動出現使得現場控制對象值(以下簡稱被控參數)發生變化,現場檢測元件就會將這種變化採集后經變送器送至PID 控制器的輸入端,並與其給定值(以下簡稱SP 值)進行比較得到偏差值(以下簡稱e 值),調節器按此偏差並以我們預先設定的整定參數控制規律發出控制信號,去改變調節器的開度,使調節器的開度增加或減少,從而使現場控制對象值發生改變,並趨向於給定值(SP 值),以達到控制目的 ,如圖所示,其實PID 的實質就是對偏差(e 值)進行比例、積分、微分運算,根據運算結果控制執行部件的過程。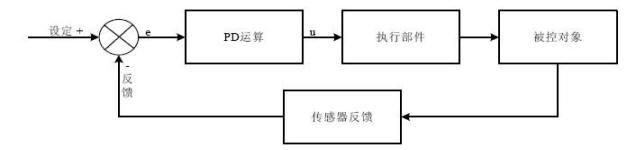
溫度控制PID 演算法設計
利用了上面所介紹的位置式PID 演算法,將溫度感測器採樣輸入作為當前輸入,然後與設定值進行相減得偏差,然後再對之進行PID 運算產生輸出結果fOut,然後讓fOut 控制定時器的時間進而控制加熱器。為了方便PID 運算,首先建立一個PID 的結構體數據類型,該數據類型用於保存PID 運算所需要的P、I、D 係數,以及設定值,歷史誤差的累加和等信息:
typedef struct PID
{
float SetPoint; // 設定目標 Desired Value
float Proportion; // 比例係數 Proportional Const
float Integral; // 積分係數 Integral Const
float Derivative; // 微分係數 Derivative Const
int LastError; // 上次偏差
int SumError; // 歷史誤差累計值
} PID;
PID stPID; // 定義一個stPID 變數
PID 運算的C 實現代碼
float PIDCalc( PID *pp, int NextPoint )
{
int dError,Error;
Error = pp->SetPoint*10 - NextPoint; // 偏差,設定值減去當前採樣值
pp->SumError += Error; // 積分,歷史偏差累加
dError = Error-pp->LastError; // 當前微分,偏差相減
pp->PrevError = pp->LastError; // 保存
pp->LastError = Error;
return (pp->Proportion * Error+ pp->Integral * pp->SumError- pp->Derivative * dError);
}
其中(pp->Proportion * Error)是比例項;(pp->Integral * pp->SumError)是積分項;(pp->Derivative * dError)是微分。
[admin via 研發互助社區 ] PT100鉑金屬溫度感測器使用已經有7118次圍觀
http://cocdig.com/docs/show-post-44648.html
