摘要:採用NE555設計步進電機脈衝產生電路,對EPROM2716進行編程實現脈衝環形分配,並決定四相八拍或四相四拍的驅動方式,電動機的運行方向由74LS191的D1J控制,設計了高低壓驅動電路,減少了限流電阻的發熱。
0 引言
由於步進電機的轉速僅取決於脈衝頻率,不受電壓高低、電流大小及其波形的影響,也不受環境溫度變化的影響。步進電機的步矩誤差不會長期積累,每轉一周積累誤差就自動變為零。具有自鎖能力,定位精度高。當某相或某幾相繞組處於通電狀態,轉子即可被鎖住。由於能自鎖,電機可停在一些穩定平衡位置上,因此即使開環控制,步進電機也有較高的定位精度。所以在數字控制系統中得到廣泛的應用。步進電機的驅動是通過各相有節拍的通斷電流來實現的,電機是感性負載,為了快速建立相應電樞電流,輸入電壓必須達到一定的值,但當電樞電流達到額定值之後,流過電機的相電流較大,在在迴路中,必須串接限流電阻。對於大功率步進電機,其限流電阻上的發熱功率很大,不僅驅動效率低,而且散熱很難解決。為解決此問題,設計了採用高低壓驅動電路的脈衝發生器、脈衝計數器和環形分配器。
1 驅動電路
1.1 脈衝產生電路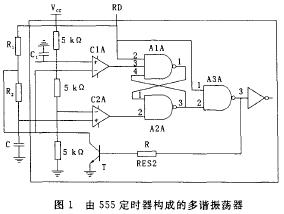
555定時器構成多諧振蕩器來產生脈衝如圖1所示。接通電源后,電容被充電,Vc上升,當Vc上升到2/3Vcc時,觸發器被複位,同時放電BJTT導通,此時Vo為低電平,電容C通過R2和T放電,使Vc下降。當Vc下降到1/3 時,觸發器又被置位,Vo翻轉為高電平。電容器C放電所需時間為:
tPL=R2Cln2≈0.7R2C
當C放電結束時,T截止,Vcc將通過R1,R2向電容器C充電,Vc由1/3Vcc 上升到2/3Vcc 所需的時間為:
tPH=(R1+R2)Cln2≈0.7(R1+R2)C
當電容C上的電壓Vc上升到2/3Vcc時,觸發器又發生翻轉,如此周而復始,在輸出端就得到一個周期性的方波,其頻率為:
f=1/(tPL+tPH)≈ 1.43/(R1+2R2)C
式中 tPL - 電容C通過R 的放電時間
tPH - Vcc通過R1,R2向電容C的充電時間
由於555定時器內部的比較器靈敏度較高,而且採用差分電路形式,它的振蕩頻率受電源電壓和溫度變化的影響很小。
1.2 環形分配器電路
由74LS191和EPROM27l6組成的脈衝分頻器和環形分配器如圖2所示。
四相混合式步進電機具有反應式步進電動機和永磁式步進電動機的優點,有雙四拍或四相八拍2種勵磁方式,拍數都是2的冪,所以計數器可直接使用二進位可逆計數器。選用74LS191,這是一種二-十六進位同步可逆計數器,時鐘脈衝從CP端(14腳)接人。計數器的輸出QA~ QD連接到EPROM2716的低4位地址線A0~A3,這樣可以選通2716的16個地址(00H~0FH)。存儲器的內容從數據線讀出,用低4位數據線(D0~D3)作為四相驅動器各相輸入線。EPROM2716的第4條地址線A4作為勵磁方式的轉換信號輸入端,其它地址都接地。當A4為低電平時,可選通000H~00FH 空間的16個地址;當A4為高電平時,可選通010H~01FH之間的16個地址。其中001H~01FH 空間為四相八拍狀態,存儲2個循環,而010H~01FH空間為雙四拍狀態,存儲4個循環。LS191第5腳為加減法輸入控制端,用該輸入端作為方向輸入的控制信號,當為低電平時,執行加法計數,即正轉狀態;當為高電平時,執行減法計數,即是反轉狀態。LS191的數據輸入端A,B,C,D各管腳接地,而腳11是置數端,當為高電平時,LS191為計數狀態;當為低電平時,191停止計數,而把數據端內容(ABCD)裝入計數器。因此,管腳11通過
電阻10kΩ拉到高電平,引出線作為清零端(複位),當輸入一個低電平脈衝時,191輸出為零,可選通2716地址000H或010H(視A 狀態定),2716輸出狀態為A(四相八拍時)或者AB(雙四拍時)。
2716的管腳OE和DE分別為輸出允許和片選端,一直接地使之處於選通狀態。地址線A4作為方式控制端,當A4=0時,選通00H~0FH空間,為四相八拍狀態;當A4=1時,選通010H~01FH空間,為雙四拍狀態。在需要零狀態輸出時,可將零狀態內容的第4位存儲0。
1.3 功率放大
從環形分配器出來的脈衝,要經過功率放大器進行放大才能驅動步進電動機,步進電機的繞組中電流時間及電阻的關係為:
提高電壓V,可以增大電流,但一旦電流建立到額定值后,就不需要高電壓,只需低的電壓就可維持額定電流。用2種電壓進行供電,這就是步進電機的高低壓驅動技術。高低壓驅動方式電流波形如圖3所示 。
圖3中的Vh是指驅動高電壓;Vl是指驅動低電壓。由於電路參數沒有改變,只是輸入電壓改變了,所以電流Il和Ih 的上升時間τ並沒有發生變
化。電機通過的總電流Ih+l達到額定電流Im 的時間Thl比τ小得多。限流電阻基本上按電機限流取值,而不是按時間常數τ取值,其值很小。這種高低壓驅動技術既達到了發熱小的目的,又滿足了電流快速建立的要求。
高低壓驅動技術對驅動方式和功率器件有較高的要求。由於雙極性功率管的導通和截止速度低,限制了驅動頻率的提高。有效的驅動頻率只能達到1~3 kHz。頻率再高時,不僅各相上的電流有效時間小,而且由於電流不能按要求截止,各相力矩在較長時間內相互抵消,嚴重地降低了步進電機的有效輸出力矩;雙極性功率管的導通壓降高、發熱大、散熱困難;雙極性功率管的驅動電流大,驅動系統複雜。因此採用功率MOS替代功率三極體。功率MOS管的導通壓降低;耐壓高、電流大;導通速度很快;驅動電流小。
採用一種功率NMOS管高低壓步進電機驅動技術,其電源為負功率,電路如圖4所示,這樣就解決了N 型管上拉負載的要求。大功率步進電機的各相是獨立的。低壓採用12 V ,既能維持電機繞組足夠的電壓要求,又可使用較小的限流電阻。高電壓採用120 V 的電源,達到了快速的電流建立時間,且與常規的NMOS功率管的耐壓匹配,在迴路中串接隔離二極體VDh,避免在高壓導通時,低壓功率MOS管承受很高的反壓,以至很容易被擊穿。
高速光耦隔離驅動高壓和低壓的驅動信號是不共電位的,採用光耦來隔離驅動。另外,信號的控制電路不能承受電機驅動時的高尖峰衝擊,也需要把控制信號和驅動器件隔離起來。選用高速光耦,最高速度為10 MHz。在環形分配器的輸出端還接了一個有74LS123構成的單穩態觸發器,用來產生大功率驅動所需的寬脈衝。
1.4 高低壓驅動步進電機的控制
高低壓驅動步進電機由555定時器產生基脈衝,74LS191和EPROM2716組成脈衝分配器,經過74LS123產生大功率驅動所需的寬脈衝。6N136將脈衝隔離輸出給驅動場效應三極體,功率放大分別接到步進電機的四相。通過模擬實驗證明,取工作電壓30V,保持電流為3A,電機的內阻為0.2Ω。普通三極體單電源限流電阻功耗90 w,而高低壓驅動僅為30 w。
2 結束語
採用74LS194 對輸入脈衝進行分頻,由EPM2716構成脈衝分配器,可以通過改變程序,驅動不同相的步進電機。在電路參數不變的條件下,利用電流的上升速度與電壓成正比的關係,採用高壓驅動,快速達到額定啟動電流,低電壓驅動降低工作電流,從而降低了限流電阻的發熱量。
[admin via 研發互助社區 ] 大功率步進電機的控制驅動電路已經有2322次圍觀
http://cocdig.com/docs/show-post-44841.html
