PID控制是最早發展起來的控制策略之一,由於其演算法簡單、魯棒性好和可靠性高,被廣泛用於過程式控制制和運動控制中。數字PID控制演算法是將模擬PID離散化得到,各參數有著明顯的物理意義,調整方便,所以PID控制器很受工程技術人員的喜愛。
轉檯是檢測和評價慣性導航與制導系統的主要測試設備。轉檯內安裝的是力矩電機,因此理想的轉檯的數學模型可以寫成直流力矩電機的數學模型,PID控制器各控制環節的作用是這樣的,比例控制(P控制)即時成比例地反應控制系統的偏差信號e(t),積分控制(I控制)主要用於消除靜差,微分控制(D控制)反應偏差信號的變化趨勢(變化速率)。比例控制是對現在誤差的一種校正,積分控制是對過去誤差的校正,而微分控制是對將來可能的誤差的校正。下面結合轉檯的控制過程對數字PID控制及其改進演算法作具體的討論。
1 Simulink模擬
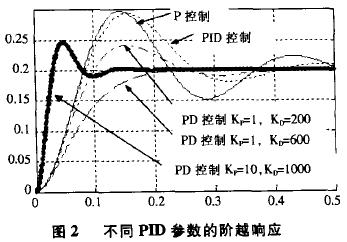
轉檯的PID控制的Simulink模擬框圖如圖1所示。其中包含了兩個子系統PID Controller(PID控制器)和Turn-table(轉檯)。對理想模型進行Simulink模擬實驗。選用不同參數的PID控制器,它們對幅值為0.2的參考輸入的階越響應的過程曲線如圖2所示。圖中實線為只採用比例控制,取Kp=1;點畫線、虛線和粗線均為採用比例微分控制,點畫線的KI=1,KD=200;虛線的Kp=1,KD=600;粗線的Kp=10,KD=1000;圖中點線為PID控制,Kp=1,KI=0.0005,KD=200。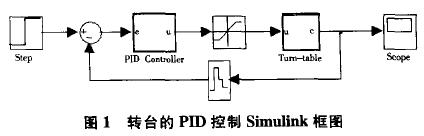
分析圖2可得出:
① 對於理想的數學模型,不需要積分控制項,只採用PD控制就夠了。由於積分控制項的目的只是消除靜差,所以在系統沒有靜差的情況下不要加入積分控制環節,因為積分控制環節會惡化過程動態特性,造成過大的超調量,並增加了調整時間;
② 不要忽視微分控制環節。要減小上升時間,增加系統的控制剛度,必然要求增加Kp,但過大的Kp會產生過大的超調,甚至使系統振蕩,但增加Kp的同時只要增加KD一般都可以減小超調,獲得較好的動態特性。可以這麼說,理想的數學模型,採用大參數的PD控制可以獲得足夠好的控制性能。但也不是說可以一味的增加KP和KD的值,因為KP值越大,控制量u也越大,消耗的能量也越多,而且u受飽和限制。
運用PD控制在實際轉檯系統中時,有較大的穩態輸出誤差,並且輸出波動較大。分析原因如下:
① 由於功率放大器有較大的死區,而且轉檯的機械系統存在有靜摩 擦力,使實際的被控系統有較大死區。所以控制器如果沒有積分環節,穩態輸出有較大的靜差;
②實際的被控系統總是會受到許多干擾,包括各種不確定的系統雜訊和量測雜訊。過大的KD會放大雜訊,使系統的輸出波動較大。
2 PlD控制的改進演算法
在理想的數學模型中加入大小為-0.25~0.25的Dead Zone(死區),如圖3所示進行模擬,模擬實驗結果如圖4所示。模擬中為了更好的探討積分環節的作用,取KD=0。圖中Kp=3,實線無積分控制作用,可以看出有較大靜差;點線為加入積分控制,並取KI=0.0015;分析可知:積分環節可以減小上升時間,但會增大超調量,延長調整時間。事實上,如果要減小上升時間,可以增大Kp的值,沒有必要為了減小上升時間而加大KI的值。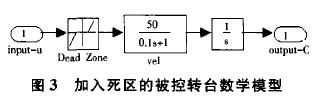
圖4中虛線為採用積分分離PID控制的過程,可以看出積分分離PID演算法明顯改善了控制過程。積分分離PID演算法的思想是在誤差較小時保留積分控制作用,而在誤差較大時取消積分控制環節。積分分離PID控制器在誤差較大時保證系統的跟蹤性能,而在誤差較小則能保證系統穩態精度和抗干擾性能,較大的改善控制性能。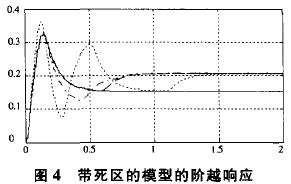
積分分離PID控制寫成公式時,可在積分項乘一係數β,其值根據誤差大小來決定。
其中:ε>0——設定的閾值。此時積分分離PID控制算式的積分控制寫為:
積分分離PID演算法的另一本質就是改變了過去的誤差對控制量的權係數,而不再是普通的求和(普通的求和權係數相同,都是1)。同時我們可以用連續函數(連續或分段連續)來計算求和的權重,比如採用連續函數: 來計算權係數β(k),其中參數ε根據需要調整,當e(k)2=ε時,β(k)=0.5。此時,積分控制量寫為:
來計算權係數β(k),其中參數ε根據需要調整,當e(k)2=ε時,β(k)=0.5。此時,積分控制量寫為: 圖4中的點畫線為變速積分控制過程,其中ε=0.0015,KI=0.004。顯然變速積分法要比積分分離演算法效果要好,但是變速積分法要花費更大的代價來實現,而且積分分離演算法效果不錯,變速積分法只不過稍稍改善了一些性能。
圖4中的點畫線為變速積分控制過程,其中ε=0.0015,KI=0.004。顯然變速積分法要比積分分離演算法效果要好,但是變速積分法要花費更大的代價來實現,而且積分分離演算法效果不錯,變速積分法只不過稍稍改善了一些性能。
根據各種改進積分環節演算法的有效性和代價,我們選擇容易實現而且效果不錯的積分分離演算法運用於我們實際的轉檯控制,得到了很好的控制效果。
3 結束語
根據對轉檯控制的模擬和經驗,總結出PID參數工程整定的一般步驟:
[admin via 研發互助社區 ] 數字PID控制及其改進演算法的應用已經有8940次圍觀
http://cocdig.com/docs/show-post-44725.html
