1 雙環電流型PWM控制器工作原理
雙環電流型脈寬調製( PWM) 控制器是在普通電壓反饋PWM 控制環內部增加了電流反饋的控制環節,因而除了包含電壓型PWM 控制器的功能外,還能檢測開關電流或電感電流,實現電壓電流的雙環控制。雙環電流型PWM控制器電路原理如圖1 所示。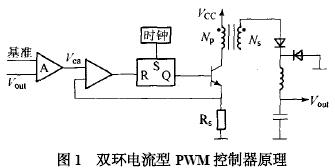
從圖1 可以看出,電流型控制器有兩個控制閉合環路:一個是輸出電壓反饋誤差放大器A ,用於與基準電壓比較后產生誤差電壓;另一個是變壓器初級(電感) 中電流在Rs 上產生的電壓與誤差電壓進行比較,產生調製脈衝的脈寬,使得誤差信號對峰值電感電流起著實際控制作用。
系統工作過程如下:假定輸入電壓下降,整流后的直流電壓下降,經電感延遲使輸出電壓下降,經誤差放大器延遲,Vea上升,占空比變化,從而維持輸出電壓不變,在電流環中電感的峰值電流也隨輸入電壓下降,電感電流的斜率di/dt 下降, 導致斜坡電壓推遲到達Vea ,使PWM占空比加大,起到調整輸出電壓的作用。由於既對電壓又對電流起控制作用,所以控制效果較好在實際中得到廣泛應用。
2 雙環電流型PWM控制器的特點
a) 由於輸入電壓Vi 的變化立即反映為電感電流的變化,不經過誤差放大器就能在比較器中改變輸出脈衝寬度(電流控制環) ,因而使得系統的電壓調整率非常好,可達到0.01 %/V ,能夠與線性移壓器相比。
b) 由於雙環控制系統內在的快速響應和高穩定性,反饋迴路的增益較高,不會造成穩定性與增益的矛盾,使輸出電壓有很高的精度。
c) 由於Rs 上感應出峰值電感電流,只要Rs 上電平達到1 V ,PWM控制器就立即關閉,形成逐個脈衝限流電路,使得在任何輸入電壓和負載瞬態變化時,功率開關管的峰值電流被控制在一定範圍內,在過載和短路時對主開關管起到有效保護。
d) 誤差放大器用於控制,由於負載變化造成的輸出電壓變化,使得當負載減小時電壓升高的幅度大大減小,明顯改善了負載調整率。
e) 由於系統的內環是一個良好的受控電流放大器,所以把電流取樣信號轉變成的電壓信號和一個公共電壓誤差放大器的輸出信號相比較,就可以實現並聯均流,因而系統並聯較易實現。
3 雙環電流型PWM控制器功率因數校正
正是基於以上特點,電流型PWM 控制器在實際應用中被越來越廣泛地採用。對它採用功率因數校正技術,可以有效地減少高次諧波對電網的干擾,減小功耗,具有較大的實際意義。
3.1 功率因數校正方法
功率因數校正主要有兩種方法:一種是將電網上公用負載端並接一個專用的功率變換器,對無功和諧波進行補償;另一種是將負載的整流電路與濾波電容之間增加一個功率變換電路,將輸入電流校正成與電網電壓相近的正弦波。實現功率因數校正在CCM 和DCM下可採用乘法器和電壓跟隨器實現,框圖如圖2所示。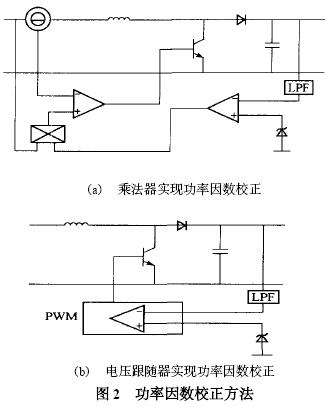
3.2 電流型PWM控制器功率因數校正方法
由於乘法器的價格昂貴,改用加法電路來實現乘法器的功能。為了使電感電流的包絡為正弦,必須使電流檢測比較器反相輸入端的輸入電壓為正弦饅頭波,基本電路如圖3 所示。
當N1 負端加上電整流取樣而得到正弦饅頭波時,經二極體降壓及電阻分壓,加到電流感應比較器負端信號為1/3 的正弦饅頭波,從而使電感電流的包絡正弦化。當然,在實際使用中還需要進行閉環控制,才能夠得到穩定的輸出電壓。
4 電流型PWM控制器斜坡補償方法
4.1 峰值電流與平均輸出電感電流
由於功率開關管的峰值電流由PWM 控制器保持恆定控制,也就是說,電感的峰值電流也保持恆定,但直流輸出電壓正比於輸出電流平均值而不是峰值電流,當輸入電壓減小時,為了使電流恆定,占空比將調節為δ2 ,這時平均電流將上升為I2 ,輸出電壓也將上升。在電壓型控制器中將不會出現這種問題,但在電壓型控制器件下,僅有輸出電壓得到控制。因此,為了解決以上問題,在電流型控制器中需採用斜坡補償加以解決。為了維持一個恆定的平均電流(輸出電壓) ,要求有一個與占空比無關的電流波形補償斜坡,當( Ns/Np ) Rs ( m2/2) = m 成立時,輸出電感平均電流與Ton無關,則保持了輸出電壓恆定。如圖4 所示。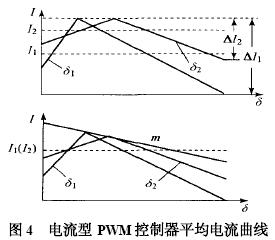
4.2 斜坡補償的實現
斜坡補償可以用圖5 所示電路來實現。一般,R1的阻值預先設定,再計算R2 的阻值,很重要的一點是R2 的阻值應足夠高,以避免使振蕩器產生振蕩頻率漂移。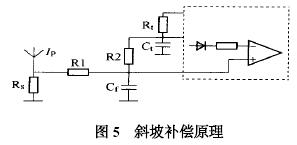
從斜坡端接電阻R2 至電流感應端,這時Rs 上的感應電壓增加斜坡的斜率與平滑的誤差電壓進行比較,這在占空比達到50 %以上時非常有效。R2 阻值的一般計算步驟如下:
a ) 計算次級電感下斜坡: S1 = di/dt ( 單位為A/μs) ;
b) 計算初級電感下斜坡: S2 = S1 Ns/Np (單位為A/μs) ;
c) 計算檢測電阻上的斜坡電壓: V1 = S2 Rs (單位為V/μs) ;
d) 計算定時電容器CT 上的振蕩器斜坡電壓: S =dVosc/Ton (單位為V/μs) ;
e) 若令斜坡補償量M = 0.75 ,R1 的阻值R1 設為1 kΩ ,則R2 = R1 ( Vs/VS2 ) M。
5 結束語
隨著電流型PWM 控制器被越來越廣泛地應用,正確掌握使用方法可以節約大量設計時間,並能取得較好的設計效果,因而是使用這一類控制器必須注意的問題。
[admin via 研發互助社區 ] 電流型PWM 控制器在電源中的應用已經有4999次圍觀
http://cocdig.com/docs/show-post-44721.html
