概述
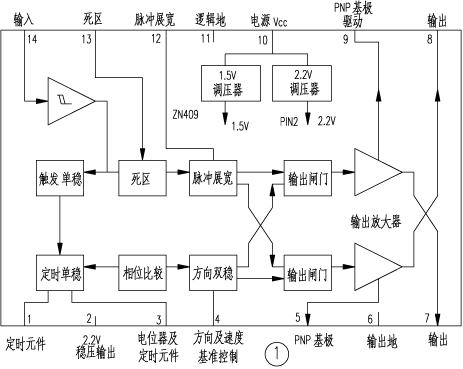
本控制器使用Ferranti公司生產的ZN419CE伺服機構控制器IC來控制模型火車的行車方向和行駛速度,圖1是該IC的內部電路框圖。輸入的正向控制脈衝可直接或通過電容耦合到{14}腳輸入端。採用直接……
| 本控制器使用Ferranti公司生產的ZN419CE伺服機構控制器IC來控制模型火車的行車方向和行駛速度,圖1是該IC的內部電路框圖。輸入的正向控制脈衝可直接或通過電容耦合到{14}腳輸入端。採用直接耦合的缺點是:一旦前級電路出現故障而使輸入信號變成持續的直流電平時,伺服機構的輸出臂將不停地旋轉而出現誤動作。如果採用電容耦合,則直流輸入電壓即被隔斷,伺服機構的輸出臂將停留在其最後的靜態位置。因此,最好是採用電容耦合。
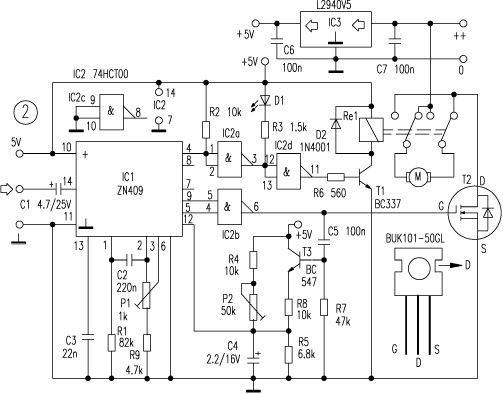
本控制器的電路見圖2。為了使ZN419CE的觸發與輸入脈衝前沿的上升速度無關,{14}腳輸入的脈衝首先經斯密特觸發器整形后,再去觸發IC內部的單穩多諧振蕩器。該振蕩器產生的脈衝寬度可用外接在1~3腳的電位器P1來微調。該脈衝與輸入脈衝由IC內部的脈衝比較器進行比較,得到的脈衝用來控制IC內部的兩個輸出放大器使之保持正確的相位。此外,模型火車在改變行駛方向時(如由前進變為倒退時),驅動電機必須有一段時間停止不動,即伺服機構應有一個“死區”,此功能由IC1內部的死區電路來實現,其外接電容C3接在{13}腳與地之間。
IC1利用輸入脈衝與單穩脈衝的寬度差來控制電機的轉速,其控制方向是使二者之差減小,所以控制的結果是,伺服機構輸出臂的位置與本控制器中電位器的轉軸位置趨於一致。控制器操縱桿的位置與輸出信號占空比(該占空比決定模型火車的速度,其值為0~100%)之間的關係取決於{12}腳的電位,並可由電位器P2調定,操縱桿和電機的其餘位置則由P1調定。
IC1的5、9腳輸出的電壓加到與非門IC2b的輸入端。IC2b輸出的脈寬調製(PWM)信號通過功率MOS場效應管T2控制電機M的轉速。該PWM信號還通過C5和T3驅動IC1內部的脈衝展寬電路,因此只有死區之外的脈衝才能被展寬,從而使電機的切換和控制得到改善。決定行駛方向的4腳電位經非門IC2a、IC2d和T1緩衝后控制繼電器Re1的通斷,從而控制電機的轉動和模型火車行駛的方向,發光二極體D1起方向指示燈的作用。由於Re1的工作電流較大(12~16A),應使模型火車在Re1釋放時向前行駛,以減小Re1吸合時奸哀節省電源消耗。
江明 編譯
摘自《電子報》 |
[admin
via
研發互助社區 ]
模型火車控制器已經有2679次圍觀
http://cocdig.com/docs/show-post-561.html
