一、EPS系統基本結構及工作原理
電動助力轉向系統(EPS,Electric Power Steering)是未來轉向系統的發展方向。該系統由電動機直接提供轉向助力,具有調整簡單、裝置靈活以及無論在何種工況下都能提供轉向助力的特點。EPS最為突出的是該系統可在不更換系統硬體的情況下,通過改變控制器軟體的設計,十分方便地調節系統的助力特性,使汽車能在不同車速下獲得不同的助力特性,以滿足不同工況下駕駛員對路感的要求。
電動助力轉向系統(EPS)主要包括感測器、控制器和執行器三大部件。感測器將採集到的信號經過相應處理后輸人到控制器,控制器運行內部控制演算法,向執行器發出指令,控制執行器的動作,系統結構如圖1所示。其工作原理為:在操縱方向盤時,轉矩感測器根據輸人轉向力矩的大小,產生出相應的電壓信號,由此電動式動力系統就可以檢測出操縱力的大小,同時,根據車速感測器產生的脈衝信號又可測出車速,再控制電動機的電流,形成適當的轉向助力。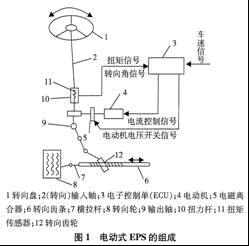
二、EPS控制系統硬體電路設計
(一)微控制器的選擇
MOTOROLA公司的MC9S12系列單片機是基於16位HCS12 CPU及0.5μm製造工藝的高速、高性能5.0V FLASH微控制器,是根據當前汽車的要求設計出來的一個系列。它使用了鎖相環技術或內部倍頻技術,使內部匯流排速度大大高於時鍾產生器的頻率,在同樣速度下所使用的時鐘頻率較同類單片機低很多,因而高頻雜訊低,抗干擾能力強,更適合於汽車內部惡劣的環境。設計方案採用MC9S12DP256單片機,其主頻高達25 MHz,同時片上還集成了許多標準模塊,包括2個非同步串列通信口SCI,3個同步串列通信口SPI,8通道輸人捕捉/輸出比較定時器、2個10位8通道A/D轉換模塊、1個8通道脈寬調製模塊、49個獨立數字I/0口(其中20個具有外部中斷及喚醒功能)、兼容CAN2.OA/B協議的5個CAN模塊以及一個內部IC匯流排模塊;片內擁有256 KB的Flash EEPROM,12KB的RAM及4KB的EEPROM,資源十分豐富。
(二)硬體電路總體框架
電動助力轉向系統的硬體電路主要包括以下模塊:MC9S12DP256微控制器、電源電路、信號處理電路、直流電機功率驅動模塊、故障診斷模塊與顯示模塊、車速感測器、扭矩感測器、發動機點火信號、電流及電流感測器等接人處理電路,另外還有電磁離合器等,EPS系統的硬體邏輯框架如圖2所示。
(三)電機控制電路設計
直流電動機是EPS系統的執行元件,電機的控制電路在系統設計中有著特殊的地位。在本系統中採用脈寬調製(PWM)控制H橋電路實施對直流電動機的控制,由4個功率MOSFET組成,如圖3所示。採用PWM伺服控制方式,MOSFET功率管的驅動電路簡單,工作頻率高,可工作在上百千赫的開關狀態下。系統採用4個International Reetifier公司生產的IRF3205型MOSFET功率管組成H橋路的4個臂。IRF3205具有8 mΩ導通電阻、功耗小、耐壓達55V、最大直流電流110A、滿足EPS系統對MOSFET功率管低壓(正常工作不超過15V)大電流(額定電流30 A)的要求。

1.H橋上側橋臂MOSFET功率管驅動電路設計
上側橋臂的MOSFET功率管驅動電路如圖4所示,其中Qa/Qb為上側橋臂的功率MOSFET a管或b管,vdble為倍壓電源電路提供的電源電壓。當MOSFET的控制信號a(b)為高電平時,Q1和Q2導通,電源通過Q2,D1以及R5與C1的並聯電路向Qa充電,直至Qa完全導通,Q3截止。當Qa導通時,忽略Qa的漏極和源極之間的電壓降,則Qa的源極電壓等於蓄電池電源電壓。此時,Qa的柵—源極電壓降VGS=( Vdble-VCE-VF-Vbat),其中VCE為2N2907的集一射極飽和導通電壓,其典型值為0.4V,VF為D1的正嚮導通壓降,其典型值為0.34V,Vbat為蓄電池電壓。為保證器件可靠導通,降低器件的直流導通損耗,VGS不低於l0V。因此需設計高效的倍壓電源電路,以保證Vdble的值足夠大,滿足功率MOSFET的驅動要求。如果蓄電池電壓為12V時,Vdble≥12V+0.34V+0.4V+10V=22.74V。
當MOSFET的控制信號a(b)管為低電平時,Q1和Q2均截止,Q3導通,Qa的柵—源極電壓通過R5與C1的並聯電路及Q3迅速釋放,直至Qa關斷。Qa關斷時,連接其柵-源之間的電阻R6使其柵-源電壓為零。IRF3205的導通門限電壓為2~4V,OV的柵—源極電壓能夠使其關斷。
2.下側橋臂的功率MOSFET管驅動電路
下側橋臂的功率MOSFET驅動電路如圖5所示,其中Qc/Qd為下側橋臂的功率MOSFET的c管或d管。當MOSFET的控制信號c(d)為高電平時,Q1導通,Q2截止,Q1的柵極電壓通過R3與C1組成的並聯電路、D1及Q1迅速釋放,Qc/Qd關斷。
當MOSFET的控制信號c(d)低電平時, Q1截止,Q2導通,電源通過Q2以及R3與C,組成的並聯電路對Qc的柵極充電,直至Qc完全導通。當Qc導通時,其柵—源極電壓等於電源電壓減去Q2的集—射極飽和導通電壓,而電源電壓又等於蓄電池電壓減去1N5819二極體的正嚮導通電壓。所以,Qc的柵—源極電壓VGS=(Vbat-VCE-VF),當蓄電池電壓為12V,取各參數為典型值得Qc的柵-源極電壓為11.26V,滿足IRF3205的柵極驅動(10V)所需的電壓。
(四)蓄電池倍壓工作電源
由於上側橋臂的MOSFET功率管的柵-源電壓必需大於22.74V,而蓄電池電壓只有12V。因此需要設計蓄電池倍壓電源,產生二倍於蓄電池電壓的電源電壓,提供給H橋a、b功率管的驅動電路,保證高側MOSFET功率管能夠完全導通。
電源倍壓電路如圖6所示,NE555定時器工作於多諧振蕩器模式,於引腳3產生幅值等於NE555的供電電壓,頻率為1/0.7(R2+2R1)C1的矩形波。C3、C4,Dl和D2構成電荷泵電路。當NE555引腳3輸出高電平時,由於電容電壓不能突變,C3正極電壓為24V或接近24V,並通過D2向C4充電,使C4電壓為24V或接近24V。由於受電路的工作效率、二極體D1和D2上的正向電壓降以及負載能力的限制,使得系統輸出電壓低於供電電壓的2倍,即供電電壓為12V時,輸出電壓低於24V,當供電電源為12V時,倍壓電源電壓約為22.9V,大於Vdb1(22.74V),可以滿足需要。
三、電機驅動電路台架試驗
根據電動轉向控制系統對穩定性和跟蹤性的需要,採用最優H二控制器編製電動轉向系統控制程序,並在汽車電動轉向試驗台上進行台架模擬試驗,車速信號用模擬車速感測器發出的脈衝信號代替網。圖7為中等車速轉向助力時,測量的方向盤轉矩(T)和助力電動機電流(I)變化曲線。從圖7中可以看出,在轉向過程中,助力電動機電流隨著方向盤轉矩的變化而變化,電動機電流的變化趨勢和方向盤轉矩的變化趨勢相吻合,表明電動機的助力轉矩對方向盤轉矩有良好的跟蹤性能。轉向操作時,無助力滯后感,轉向平穩,表明轉向系統具有良好的跟蹤性能和操縱穩定性。
四、結論與展望
MC9S12系列16位單片機片內資源豐富,對於一般的簡單應用,只需一片單片機加少量圍電路即可。開發的直流電機電路經初步試驗,性能良好,可基本滿足電動助力系統轉向系統的需要。文中只介紹電動助力轉向系統硬體電路設計的基本框架,為獲取良好的控制效果,電動助力轉向系統將不僅僅局限於依據車速和扭矩這2個基本的信號進行電動助力轉向系統的研製,轉向角、轉向速度、橫向加速度及前軸重力等多種信號在未來的電動助力轉向系統中可能都是要考慮的因素。
[admin via 研發互助社區 ] 電動助力轉向系統(EPS)電機驅動電路的設計已經有3240次圍觀
http://cocdig.com/docs/show-post-44897.html
