摘 要:提出了步進電機的幾種速度調節方法。脈衝頻率的調節採用軟體延時或硬體定時。升降頻採用直線升降法、指數曲線升降法或拋物線升降法。給出了脈衝頻率調節的實用程序,通過對步進電機矩頻特性曲線的分析,得出了步進電機的升頻表格,並提供了一個完整的軟體升降頻流程圖。幾種調速方法應用在多種數控機床上,提高了步進電機的定位精度,改善了電機轉動的平穩性,加速了電機的升降過程。
0 引言
步進電機是一種數字電機,在經濟型數控機床及自動化設備中應用廣泛。控制步進電機的轉動需要3個要素:方向、轉角和轉速。對於含
有硬體的驅動電源,方向取決於控制器送出的方向電平的高或低。轉角取決於控制器送出的步進脈衝的個數。而轉速則取決於控制器發出的步進脈衝之間的時間間隔。在步進電機的控制中,方向和轉角控制簡單,而轉速控制則比較複雜。步進電機工作時,失步或過沖直接影響其定位精度。在設計系統的時候,除了應正確選擇步進電機和驅動電源之外,還必須對步進電機控制脈衝的頻率進行調節。由於步進電機的轉速正比於控制脈衝的頻率,所以調節步進電機脈衝頻率,實質上就是調節步進電機速度。
本文將具體討論步進電機的速度調節問題,並結合實例給出軟體實現的方法。
1 步進脈衝的調頻方法
對步進電機控制的一個中心問題就是速度調節。即產生一系列頻率可調的步進脈衝序列,送到驅動電源,控制電機繞組的輪流通電,實現電機的轉動。脈衝序列的產生用微處理器實現,有軟體延時和硬體定時兩種方法。
(1)軟體延時:通過調用標準的延時子程序來實現。假定控制器基於AT89S52單片機 ,晶振頻率為12 MHz,那麼可以編製一個標準的延時
子程序如下: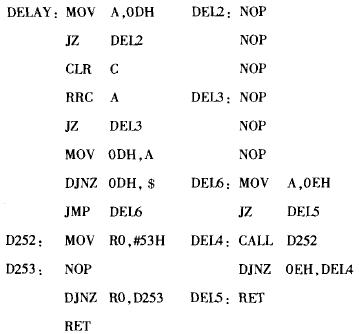
該子程序的入口為(0E)(0D)兩個位元組,若需要20000 us的延時,則給(0E)(0D)兩個位元組賦值4E20H,即執行下面程序:
MOV 0EH,#4EH ;20 000的十六進位碼為4E20。
MOV 0DH.#20H
CALL DELAY ;調用標準延時子程序DELAY。
若要控制步進電機走100步,每兩步之間延時20 000 s,則彙編程序為:
MOV 0FH,#100D ;準備走100步。
CONTI: CALL I_STEP ;電機走一步(調用電機的脈衝分配子程序)
MOV 0EH,#4EH ;20 000的十六進位碼為4E20。
MOV 0DH,#20H
CALL DELAY ;相鄰步之間的延時(決定電機的轉速)。
DJNZ 0FH,CONTI ;循環次數減1后,若不為0則繼續,循環100次。
可以看出,採用軟體延時方法實現速度調節的優點是程序簡單,思路清晰,不佔用硬體資源。缺點是浪費CPU的寶貴時間,在控制電機轉動的過程中,CPU不能做其它事。
(2)硬體定時:假定控制器仍為AT89S52單片機,晶振頻率為12 MHz,將AT89S52的TD作為定時器使用,設定T0工作在模式1(16位定時/
計數器)。今要求它能定時地發出步進脈衝,其定時中斷產生的脈衝序列的周期(即步進電機的脈衝間隔)假定為20 000 s,則可算出TD所對應
的定時常數為B1E0H,CPU相應的程序如下:
主程序:
MOV TMOD,#01H ;設T0取工作模式1。
MOV TH0.#0B1H ;裝入定時常數高8位。
MOV TLO,#0E0H ;裝入定時常數低8位。
SETB TR0 ;啟動T0定時。
SETB ET0 ;允許T0中斷。
SETB EA ;允許CPU中斷。
$ ;CPU等待T0的定時到。
中斷服務程序:
CLR ET0 ;關T0中斷。
CALL I_STEP ;控制電機走一步(調用電機的脈衝分配子程序)。
RETI ;T0中斷返回。
本例中,只要改變T0 的定時常數,就可實現步進電機的調速。這種方法既需要硬體(T0定時器)又需要軟體來確定脈衝序列的頻率,所以是
一種軟硬體相結合的方法。它的缺點是佔用了一個定時器。在比較複雜的控制系統中常採用定時中斷的方法,這樣可以提高CPU的利用率。
2 升降頻方法及其實現
2.1 升降頻方法
當步進電機的運行頻率低於它本身的起動頻率時,步進電機可以用運行頻率直接起動,並以該頻率連續運行,需要停止的時候,可以從運行頻率直接降到零速。此時,電機運行於恆速狀態,無需升降頻控制。當步進電機的運行頻率fb>fa (fa為步進電機有載起動時的起動頻率)時,若直接用fb起動,由於頻率太高,步進電機會丟步,甚至產生堵轉。同樣,在fb頻率下突然停止,步進電機會超程。因此,當要求步進電機在運行頻率.fb下正常工作時,就需要採用升降頻控制,以使步進電機從啟動頻率fa開始,逐漸加速升到運行頻率fb,然後進入勻速運行,最後的降頻可以看作是升頻的逆過程。
步進電機常用的升降頻控制方法有3種:
(1)直線升降頻。如圖1所示。這種方法是以恆定的加速度進行升降,平穩性好,適用於速度變化較大的快速定位方式。加速時間雖然長,但
軟體實現比較簡單。
圖1 直線升降頻
(2)指數曲線升降頻。如圖2所示,這種方法是從步進電機的矩頻特性出發,根據轉矩隨頻率的變化規律推導出來的。它符合步進電機加減速過程的運動規律,能充分利用步進電機的有效轉矩,快速響應性能較好,升降時間短。指數升降控制具有較強的跟蹤能力,但當速度變化較大時平衡性較差,一般適用於跟蹤響應要求較高的切削加工中。
圖2 指數曲線升降頻
(3)拋物線升降頻。如圖3所示,拋物線升降頻將直線升降頻和指數曲線升降頻融為一體,充分利用步進電機低速時的有效轉矩,使升降速
的時間大大縮短,同時又具有較強的跟蹤能力,這是一種比較好的方法。
圖3 拋物線升降頻
2.2 軟體實現
步進電機在升降頻過程中,脈衝序列的產生,即兩個脈衝時間間隔的軟體確定,有2種方法:
(1)遞增/遞減一定值。如線性升降頻,兩脈衝頻率的差值 Δf= |fi-fi-1|是相等的,其對應的時間增量Δf也是相等。時間的計算若採用軟體延時的方法,可先設置一個基本的延時單元Te,不同頻率的脈衝序列可由Te的不同倍數產生。設起動時所用頻率對應的時間常數為tNe 以後逐次遞減Δt(設Δt=tM),直到等於運行頻率所對應的時間(tRe)為止。這種方法編程簡單,節省內存。時間計算也可採用定時中斷的方法,可將定時常數逐次遞增/遞減一定值,實現升降頻控制。因其定時不是連續的,所以升降速曲線不是一條直線,而是折線,但可近似看成直線。
(2)查表法。為了對步進電機實現最佳升降頻控制,縮短電機的升降頻時間,可從步進電機矩頻特性出發進行分析。由步進電機的矩頻特性(見圖4,130BC3100A電機)可知,轉矩M是頻率f的函數(即角加速度dω/dt=M(f)/J,J為電機的轉動慣量),它隨著f的上升而下降,所以它呈軟的特性。當頻率較低時,轉矩M較大,對應的角加速度dω/dt也較大,所以升頻的脈衝頻率增加率df/dt應取得大一些;當頻率較高時, 較
小,dω/dt也較小,此時,升頻的脈衝頻率增加率df/dt應取小一些,否則,會由於無足夠的轉矩而失步。因此,根據步進電機的矩頻特性,可以看出:在步進電機的升頻過程中,應遵循“先快后慢”的原則。按此要求,從開始升頻到升至fb之間,按最佳升頻要求的頻率取出f1,f2,f3,……,fn並將它們所對應的脈衝間隔時間t1,t2 ,…… ,tn,依次存於內存的一個數據區,如表1所示(稱階梯頻率表)。
圖4 步進電機的矩頻特性曲線
考慮到步進電機的慣性作用。在升速過程中,如果速率變化太大,電機響應將跟不上頻率的變化,出現失步現象。因此,每改變一次頻率,要求電機持續運行一定步數(稱階梯步長),使步進電機慢慢適應變化的頻率,從而進入穩定的運行狀態。根據最佳升降頻控制規律,可推出步進電機的“頻率-步長”關係曲線如圖5所示。
圖5 頻率-步長曲線
這樣,升頻時除需將階梯頻率表存於內存的一個數據區內外,還需建立另一個數據區,用來存放階梯步長(如表2所示)。在升頻過程中,可用查表的方法,分別得到fi=(ti)和所對應的△Li,實現升降頻控制。軟體上的具體做法是:將 fi(ti)和△Li在EPROM中交替存放(如表3所示),程
序執行時按順序取數,每次取出一個頻率和該頻率對應的步長。

詳細的步進電機升降頻軟體流程如圖6所示。
3 結語
本文提出的步進電機的速度調節方法,成功地應用在多種經濟型數控機床上,包括2坐標車床、4坐標銑床、高速沖床、中頻淬火機床等。
實踐表明:只要選用了適當的升降頻便可提高機床的定位精度、改善運動部件的平穩性、縮短步進電機的升降時間、提高勞動生產率。
[admin via 研發互助社區 ] 步進電機的速度調節方法已經有2353次圍觀
http://cocdig.com/docs/show-post-44813.html
