摘要:設計一種步進電機驅動電路,使加到電機繞組上的電流信號前後沿較陡,降低了開關損耗,改善了電機的高頻特性,同時具有多種保護功能.實驗證明,該驅動電路簡單、可靠並具有優良的驅動性能.
H橋功率驅動電路可應用於步進電機、交流電機及直流電機等的驅動.永磁步進電機或混合式步進電機的勵磁繞組都必須用雙極性電源供電,也就是說繞組有時需正向電流,有時需反向電流,這樣繞組電源需用H橋驅動.本文以兩相混合式步進電機驅動器為例來設計H橋驅動電路.
1 電路原理
圖1給出了H橋驅動電路與步進電機AB相繞組連接的電路框圖.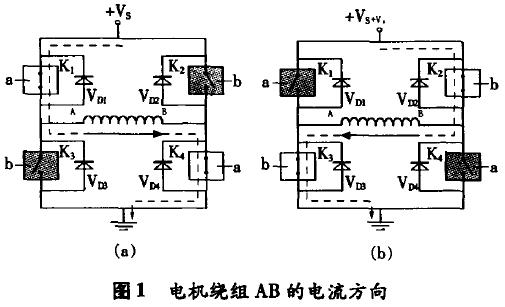
4個開關K1和K4,K2和K3分別受控制信號a,b的控制,當控制信號使開關K1,K4合上,K2,K3斷開時,電流在線圈中的流向如圖1(a),當控制信號使開關K2,K3合上,K1,K4斷開時,電流在線圈中的流向如圖1(b)所示.4個二極體VD1,VD2,VD3,VD4為續流二極體,它們所起的作用是:以圖1(a)為例,當K1,K4開關受控制由閉合轉向斷開時,由於此時線圈繞組AB上的電流不能突變,仍需按原電流方向流動(即A→B),此時由VD3,VD2來提供迴路.因此,電流在K1,K4關斷的瞬間由地→VD3→線圈繞組AB→VD2→電源+Vs形成續流迴路.同理,
在圖1(b)中,當開關K2,K3關斷的瞬間,由二極體VD4,VD1提供線圈繞組的續流,電流迴路為地→VD4→線圈繞組BA→VD1→電源+Vs.步進電機驅動器中,實現上述開關功能的元件在實際電路中常採用功率MOSFET管.
由步進電機H橋驅動電路原理可知,電流在繞組中流動是兩個完全相反的方向.推動級的信號邏輯應使對角線晶體管不能同時導通,以免造成高低壓管的直通.
另外,步進電機的繞組是感性負載,在通電時,隨著電機運行頻率的升高,而過渡的時間常不變,使得繞組電流還沒來得及達到穩態值又被切斷,平均電流變小,輸出力矩下降,當驅動頻率高到一定的時候將產生堵轉或失步現象.因此,步進電機的驅動除了電機的設計盡量地減少繞組電感量外,還要對驅動電源採取措施,也就是提高導通相電流的前後沿陡度以提高電機運行的性能.
步進電機的缺陷是高頻出力不足,低頻振蕩,步進電機的性能除電機自身固有的性能外,驅動器的驅動電源也直接影響電機的特性.要想改善步進電機的頻率特性,就必須提高電源電壓.
2 電路設計
圖2給出了驅動器AB相線圈功率驅動部分原理圖.
圖2 H橋驅動電路和功率MOSFET管的驅動
選用的功率MOSFET元件是IRFP460,其,ID=20A,VDss= 500 V,RDS(ON)=0.27Ω。
在圖2中,功率MOSFET管VT1,VT2,VT3,VT4和續流二極體 VD11,VD19,VD14,VD22相當於圖1中的K1,K2,K3,K4和VD1,VD2,VD3,VD4.功率MOSFET管的控制信號是由TTL邏輯電平a,a,b,b來提供的,其中a與a,b與b在邏輯上互反.
2.1 驅動電流前後沿的改善
從步進電機的運行特性分析中知道 ,性能較高的驅動器都要求提供的電流前後沿要陡,以便改善電機的高頻響應.本驅動器中由於功率MOSFET管柵極電容的存在,對該管的驅動電流實際表現為對柵極電容的充、放電.極間電容越大,在開關驅動中所需的驅動電流也越大,為使開關波形具有足夠的上升和下降陡度,驅動電流要具有較大的數值.如果直接用集電極開路的器件如SN7407驅動功率MOSFET管,則電路在MOSFET管帶感性負載時,上升時間過長,會造成動態損耗增大.為改進功率MOSFET管的快速開通時間,同時也減少在前級門電路上的功耗,採用圖2虛線框內的左下臂驅動電路.
集電極開路器件U14是將TTL電平轉換成CMOS電平的緩衝/驅動器,當U14輸出低電平時,功率MOSFET管VT2的柵極電容通過1N4148被短路至地,這時U14吸收電流的能力受U14內部導通管所允許通過的電流限制.而當U14輸出為高電平時,VT2管的柵極通過晶體管V3獲得電壓和電流,充電能力提高,因而開通速度加快.
2.2 保護功能
圖2虛線框中,1N4744是柵源間的過壓保護齊納二極體,其穩壓值為15 V.由於,功率MOSFET管柵源間的阻抗很高,故工作於開關狀態下的漏源間電壓的突變會通過極間電容耦合到柵極而產生相當幅度的VCS脈衝電壓.這一電壓會引起柵源擊穿造成管子的永久損壞,如果是正方向的VCS脈衝電壓,雖然達不到損壞器件的程度,但會導致器件的誤導通.為此,要適當降低柵極驅動電路的阻抗,在柵源之間並接阻尼電阻或接一個穩壓值小於20 V而又接近20V的齊納二極體1N4744,防止柵源開路工作.
功率MOSFET管有內接的快恢復二極體.當不接VD11,VD12,VD13,VD14時,假定此時電機AB相繞組由VT1管(和VT4管)驅動,即VT2管(和VB)截止,VT1管(和VT4管)導通,電流經VT1管流過繞組.當下一個控制信號使VT1管關斷時,負載繞組的續流電流經VT2的內接快恢復二極體從地獲取.此時,VT2管的漏源電壓即是該快恢復二極體的通態壓降,為一很小的負值.當VT1再次導通時,該快恢復二極體關斷,VT2的漏源電壓迅速上升,直至接近於正電源的電壓+VS,這意味著VT2漏源間要承受很高且邊沿很陡的上升電壓,該上升電壓反向加在VT2管內的快恢復二極體兩端,會使快恢復二極體出現恢復效應,即有一個很大的電流流過加有反向電壓的快恢復二極體.為了抑制VT2管內的快恢復二極體出現這種反向恢復效應,在圖2電路中接人了VD11,VD12,VD13,VD14。其中,反並聯快恢復二極體VD11,VD14的作用是為電機AB相繞組提供續流通路,VD12,VD13是為了使功率MOSFET管VT1,VT2內部的快恢復二極體不流過反向電流,以保證VT1,VT2在動態工作時能起正常的開關作用.VD19,VD20,VD21,VD22的作用亦是同樣的道理.
對圖2電路的分析可知,信號a=1,b=1的情況是不允許存在的,否則將因同時導通從而使電源直接連到地造成功率管的損壞;另外,根據步進電機運行脈衝分配的要求,VT1,VT2,VT3,VT4經常處於交替工作狀態,由於晶體管的關斷過程中有一段存儲時間和電流下降時間,總稱關斷時間,在這段時間內,晶體管並沒完全關斷.若在此期間,另一個晶體管導通,則造成上、下兩管直通而使電源短路,燒壞晶體管或其他元器件.為了避免這種情況,可採取另加邏輯延時電路,以使H橋電路上、下兩管交替導通時可產生一個“死區時間”,先關后開,防止上、下兩管直通現象.
3 結論
本驅動器電源驅動部分線路簡單,通過對電流前後沿的合理設計,降低了開關損耗,改善了電機的高頻特性,並具有多種保護功能,實際使用中效果良好.
[admin via 研發互助社區 ] 步進電機H橋驅動電路設計已經有4965次圍觀
http://cocdig.com/docs/show-post-44805.html
