1 概述
步進電機自動定位系統的主要特點是能實現精確移位、精確定位、無積累誤差。它一般應用於難度較大、要求精度高的繪圖機或數控機床等系統中。單片機控制步進電機自動定位系統的主要優點是:
⑴用軟體代替由硬體電路組成的步進電機控制器,不僅簡化了線路,降低了成本,而且提高了系統的可靠性。
⑵為改善步進電機以低於極限啟動頻率恆速運行時,運行時間過長的缺點,進行加減速控制;步進電機從低速不失步地加速啟動,達到高速恆速運行;在將達到目標位置時,步進電機減速運行,最後準確的停在目標位置上,而不會發生過沖現象。這就要求單片機控制的步機電機有加減速控制過程。
⑶微機通過RS232串口實現對單片機的多機通訊,能實時遠距離監控由步進電機驅動的工作台,並實時顯示工作台當前運行位置和方向。
系統的工作過程是:從鍵盤和滑鼠輸入定點坐標(X、Y)后,微機通過串口向各單片機發出指令,各單片機接受到指令后,由單片機軟體控制X電機和Y電機的轉動方向、轉動步數、轉動速度,達到自動定位的目的。系統所用電機為75BF001型反應式步進電機(其相數為三相,步距角1.5°/3°,直流電壓為24V,相電流為3A)。
2 系統硬體設計
硬體線路是由單片機、介面電路、光耦電路、驅動電路、直流電壓源電路、步進電機及負載組成,見圖1。單片機採用89C51晶元,介麵線路中採用74LS377為輸出口,1Q-3Q接電機的三相。光電隔離電路的目的是割斷驅動電路與單片機之間的聯繫,避免一旦驅動電路發生故障造成功率放大器中的高電平信號進入單片機而燒毀器件,為此,在驅動器與單片機之間加一級以4N25為主要元件的光電隔離電路,從而提高系統的抗干擾能力。T1採用了高速開關三級管3DK4B,T2選用了TIP41C大功率晶體管。RS、RC、D1構成了泄放迴路。尤其需要注意的是:由於該電阻功耗較大,最好選用大瓦數線繞電阻;RC為限流電阻,RC=8Ω;D1為泄放二級,要求能通過大電流,可選用整流二極體IN5402。單片機與電機—相的連接見圖2。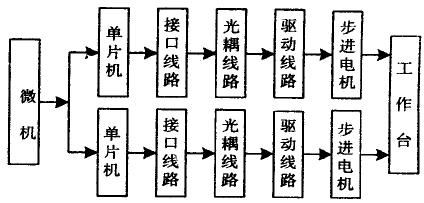
圖1 單片機硬體線路圖
圖2 單片機與電機一相的連接圖
3 系統軟體設計
系統軟體設計的主要任務是判斷電機的轉動方向、速度和位置,按順序發出控制脈衝、判斷電機是否運行至定位點。由於兩個電機的控制完全類似,程序中僅介紹控制一個步進電機的情況。兩電機正轉的控制脈衝是:A-AB-B-BC-C-CA,反轉控制脈衝順序與之相反。產生時序脈衝的方法是:用單片機的PI口通過MOV@R0,A,寫脈衝序列給74LS377;在由74L377控制電機的A、B、C三相繞組。根據三相六拍運行方式,則X電機和Y電機的控制模型為01H、03H、02H、06H、04H、05H。以三相六拍運行方式採用定時器延時的方法來編寫升(降)頻的控制程序。
圖3 單片機變頻控制程序圖
在升頻段,設置定時器的初值由小到大,逐次按預定的頻階上升(圖4);在降頻段,設置定時器的初值由大到小,逐次按預定(圖5)的頻階下降,控制按查詢表格的方式進行。恆頻段步長L由到達指定位置總步數減去升降段總步數確定。定時器T0的各頻階初值依次寫在EPROM存儲器的同一頁中,上半頁為升頻時T0的初值,下半頁為降頻時的初值。系統的主程序見圖4,單片機串口子程序見圖5。
單片機通過串口接收到微機的指令后,執行相應子程序(圖5)。微機通過兩種方式發送指令:一種是非周期性指令,通常為操作者實時控制指令;另一種是周期性指令,要求單片機實時返回工作台當前位置及運行狀態。單片機串口中斷子程序接收指令后直接回送給微機,微機可以實時顯示工作台當前位置。
圖4 單片機主程序框圖
圖5 單片機串口子程序圖
4 實驗結果及結論
經聯機調試,系統運行正常,實現正轉、反轉、加減速、暫停等自動定位功能,達到設計要求。其特點如下:
⑴用89C51單片機微機系統,以軟硬體結合,可降低成本,節約能源。
⑵採用變頻控制,提高系統運行速度,可以節約大量時間,並具有良好的經濟效益。
⑶採用RS232通訊口,實現了數控系統的通用性設計和遠距離監控。
⑷軟體採用模塊化設計方法,易於維護。
[admin via 研發互助社區 ] 單片機控制的步進電機自動定位系統已經有1944次圍觀
http://cocdig.com/docs/show-post-42206.html
