1 引言
本文研究的被控對象為某生產過程中用到的恆溫箱,按工藝要求需保持箱溫100℃恆定不變。我們知道溫度控制對象大多具有非線性、時變性、大滯后等特性, 採用常規的PID 控制很難做到參數間的優化組合, 以至使控制響應不能得到良好的動態效果。而模糊控制通過把專家的經驗或手動操作人員長期積累的經驗總結成的若干條規則,採用簡便、快捷、靈活的手段來完成那些用經典和現代控制理論難以完成的自動化和智能化的目標, 但它也有一些需要進一步改進和提高的地方。模糊控制器本身消除系統穩態誤差的性能比較差, 難以達到較高的控制精度, 尤其是在離散有限論域設計時更為明顯, 並且對於那些時變的、非線性的複雜系統採用模糊控制時, 為了獲得良好的控制效果, 必須要求模糊控制器具有較完善的控制規則。這些控制規則是人們對受控過程認識的模糊信息的歸納和操作經驗的總結。然而, 由於被控過程的非線性、高階次、時變性以及隨機干擾等因素的影響, 造成模糊控制規則或者粗糙或者不夠完善, 都會不同程度的影響控制效果。為了彌補其不足, 本文提出用自適應模糊控制技術,達到模糊控制規則在控制過程中自動調整和完善, 從而使系統的性能不斷完善, 以達到預期的效果。
2 自調整模糊控制器的結構及模擬
(1) 控制對象
一般溫度可近似用一階慣性純滯后環節來表示, 其傳遞函數為:
式中: K———對象的靜態增益;
Tc———對象的時間常數;
τ———對象的純滯后時間常數。
本文針對某乾燥箱的溫度控制, 用Cohn-Coon 公式計算各參數得:
K=0.181; Tc=60; τ=20。
( 2) 自調整模糊控制器的結構
自調整模糊控制器的結構如圖1 所示。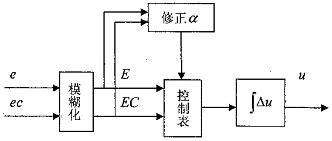
圖1 帶自調整因子的模糊控制器
圖中α為調整因子, 又稱加權因子。通過調整α值,可以改變偏差E 和偏差變化EC 對控制輸出量U 的加權程度, 從而調整了控制規則。但是, 若α值一旦選定, 在整個控制過程中就不再改變, 即在控制規則中對偏差、偏差變化的加權固定不變。然而, 在實際控制中, 模糊控制系統在不同的狀態下, 對控制規則中偏差E 與偏差變化EC的加權程度會有不同的要求。為了適應被控對象的結構和參數的變化, 並模擬人工控制中的學習過程可以構造一個如圖1 所示的帶自調整因子的模糊控制器, 其實質是一個二級模糊控制系統。
具體方法是: 將調整因子α看作是一個模糊集, 其論域為( 0, 0.1, 0.2, 0.3, 0.4, 0.5, 0.6, 0.7, 0.8, 0.9,1) ; 根據希望的控制性能構造α的修改規則; 根據檢測及計算得到的信息查修正表, 以選擇適當的α值; 由下式計算控制量的變化值:
U=-int [αE+ (1-α)EC]
此時, 上式所描述的控制規則體現了按誤差的大小自動調整誤差對控制作用的權重, 因為這種自動調整是在整個誤差論域內進行的, 所以這種自調整過程更符合人在控制決策過程中的思維, 已經具有高“智能” 的優化特點,且非常易於通過微機實時地實現其控制思想。
( 3) 自調整模糊控制器的模擬
在模糊控制系統中, 模糊控制的性能在很大程度上取決於模糊控制規則的確定是否合理以及模糊控制器的有關參數大小選擇是否合適。簡單的模糊控制器具有設計比較簡單、控制性能比較好的特點。對於複雜的控制系統, 採用相似的模糊控制規則以及一組固定不變的參數, 往往控制性能不夠理想。根據上文介紹的內容, 進行以下幾種控制方法的模擬, 包括: 比例參數Ku 的自調整模糊控制、量化因子Ke 和Kec 自調整模糊控制、控制規則自調整的模糊控制。模擬結果如圖2 所示。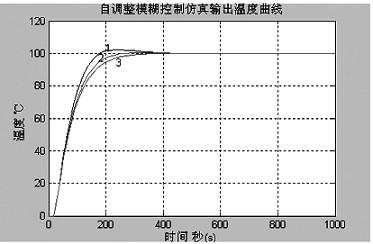
圖2 自調整模糊控制模擬曲線圖
圖中, 第1、2、3 條曲線分別代表比例參數Ku、控制規則、量化因子Ke 和Kec 自調整模糊控制模擬輸出溫度曲線。它們的控制性能指標如表1 所示。
| 超調量 | 穩態誤差 | 調節時間 | |
| 比例參數Ku 自調整模糊控制器 | 2% | ≤0.01℃ | 390s |
| 量化因子Ke 和Kec 自調整模糊控制器 | 0.1% | ≤0.01℃ | 420s |
| 控制規則自調整模糊控制器 | 0.1% | ≤0.01℃ | 270s |
3 控制系統硬體設計
本系統由PC 機運行用Delphi6.0 編寫的RS-232 串列通信控制軟體與單片機進行串列通信實現對溫度箱內溫度的實時控制。PC 機作為上位機負責接收外部命令, 由串口輸出后經介面電路發送到單片機, 使其執行相應的動作。
單片機作為下位機構成溫度箱的模糊控制系統。由PT100 型鉑熱電阻作為溫度感測器把被控對象的溫度信號轉化為mV 級電壓信號, 經運算放大器放大為0~5V 的電壓信號, 然後經串列A/D 轉換得到數字量, 被AT89C51單片機I/O 口讀取, 和事先已存於片內的EEPROM中的溫度電壓對照查詢表對照, 即可得到實際的溫度值, 一路進行在線顯示並經串列口傳送到PC 機儲存和作圖, 一路作為控制器的輸入變數。控制器的輸出通過單片機的I/O 口經D/A 轉換變為模擬信號, 經放大器放大後去觸發可控硅的導通角, 以達到調節溫度箱加熱功率的目的。整個控制系統構成一個閉環系統, 其原理圖如圖3 所示。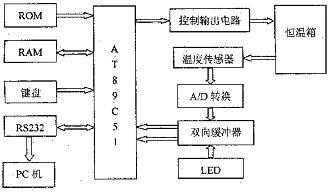
整個控制系統也可以在沒有PC 機的參與下, 由AT89C51 單片機獨立完成控制任務, 只是由於單片機功能的限制使人機交互不太理想。
4 控制系統軟體設計
( 1) PC 機軟體設計
PC 機完成的功能主要包括: 控制系統的啟動、停止,控制參數設置, 儲存單片機傳送過來的實時採集的溫度數據並將其實時顯示和繪圖。軟體流程框圖如圖4 所示。PC機軟體由Delphi6.0 編寫, 溫度曲線圖的繪製通過TCHART控制項編程實現。溫度數據的存儲通過建立Access 資料庫,將數據實時存入資料庫來實現。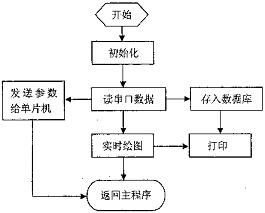
( 2) 控制規則自調整模糊控制器的軟體設計
由計算機程序實現控制規則自調整模糊控制器的控制演算法, 流程框圖如圖5 所示。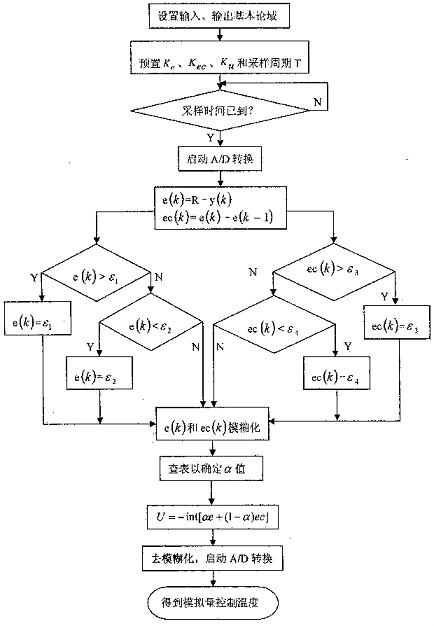
程序包括如下兩個部分:
1) 計算機離線計算查詢表程序。查詢表的建立方法是: 將調整因子α看作是一個模糊集, 其論域為( 0, 0.1,0.2, 0.3, 0.4, 0.5, 0.6, 0.7, 0.8, 0.9, 1) ; 根據希望的控制性能構造α的修改規則; 將之製成查詢表, 將此表存於計算機內存中, 供計算機在線控制時使用。
2) 計算機在線實時控制程序。該程序在模糊控制過程中完成在線計算輸入變數( 誤差和誤差變化率) , 並將它們模糊化處理, 查找查詢表后再作輸出處理。具體步驟如下:
①設置輸入、輸出變數及控制量的基本論域, 預置量化因子、比例因子和採樣周期。
②判斷採樣時間到否, 若時間已到, 則轉向第三步,否則等待。
③啟動A/D 轉換, 進行數據採集。
④ 計算誤差和誤差變化並判斷它們是否已超過上( 下) 限值, 若已超過, 則將其設定為上( 下) 限值。
⑤按給定的量化因子將誤差和誤差變化模糊化, 並由此查詢存放在計算機內存中的α修改規則查詢表, 以選擇適當的α值。
⑥由下式計算控制量的值: U=- int [ αe+ ( 1- α) ec] ,將此值乘以給定的比例因子, 若已超過上( 下) 限值, 則設置為上( 下) 限值。
⑦啟動D/A 轉換得到控制器實際輸出模擬量用來控制溫度箱的溫度。
( 3) PC 機與單片機串口通信軟體設計
PC 機與單片機串口通信通過MAX3225E 串口通信晶元來實現。軟體的設計包括單片機串口通信和PC 機( 上位機) 串口通信兩部分內容, 兩者必須遵從相同的通信協議才能正常通信。系統採用串口通信格式如下: 波特率為4800bps, SMOD=1, 單片機串口工作於方式1; 用T1 作為定時器, 工作於方式2, fOSC=11.0592M。
將以上已知條件帶入下面的串口波特率計算公式:
計算得到: TH1=244 ( 十進位) =0F4H ( 十六進位) 。
數據位: 8 位; 奇偶位: 無; 啟始位: 1 位; 停止位:1 位。
單片機串口通信程序包括串口初始化程序和中斷服務程序, 用C51 編寫。串口初始化程序是對串口工作方式進行設置, 控制寄存器PCON 和SCON 的設置以及定時器T1的設置。中斷服務程序主要是採用中斷方式來接收和發送數據, 同時要用軟體方式清除接收中斷標誌RI(響應接收中斷後) 和發送中斷標誌TI(響應發送中斷後) 。單片機串口通信程序流程框圖見圖6 所示。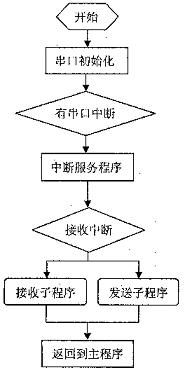
PC 機串口通信程序用於讀取單片機發來的溫度數據和向單片機發送參數及命令, 用Delphi6.0 編製, 利用串口控制項SPCOMM可實現PC 機串口通信, 其流程框圖見圖7 所示。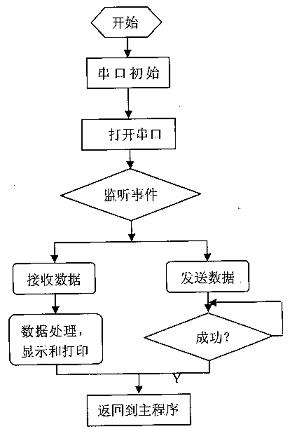
( 4) 抗干擾設計
系統的抗干擾能力是系統可靠性的重要指標。本系統主要採用有硬體抗干擾設計和軟體抗干擾設計。
1) 硬體抗干擾設計
①在後向通道設計中採用光電耦合器MOC3041。光電耦合器具有和高的絕緣電阻可達歐姆以上, 並能承受2000V 以上高壓, 因而能有效隔離高電壓對微機系統的各種雜訊干擾, 抑制尖峰脈衝電壓, 具有很強的抗干擾能力。
②數字信號的傳輸採用雙絞線。雙絞線的阻抗高, 抗共模雜訊能力強, 能使各個小環路的電磁感應干擾相互抵消, 對電磁場具有一定的抑制效果。
③電源線應盡量加粗。可使信號電平穩定和增加抗干擾能力, 使電源線能通過3 倍於印刷電路板上的允許電流。
④接地線盡量構成閉環路, 可增加抗干擾能力。
⑤配置去耦電容。電源輸入端接10~100μF 的電解電容, 給每個IC 集成晶元配置一個0.01μF 的陶瓷電容器。
2) 軟體抗干擾設計
採用限幅濾波法消除干擾, 其方法是將兩次相鄰的採樣值求出其增量, 然後與兩次採樣允許的最大差值Δy 進行比較; 若小於或等於Δy, 則取本次採樣值, 若大於Δy,則取上次採樣值作為本次採樣值, 即
|yn-yn-1|≤Δy, 則yn 有效;
|yn-yn-1|>Δy, 則yn-1 有效。
式中: yn———第n 次採樣值;
yn-1———第n-1 次採樣值;
Δy———相鄰兩次採樣值允許的最大偏差。
( 5) 誤差分析
誤差主要來源是:
①PT100 鉑熱電阻在0℃~100℃範圍存在0.1℃的誤差。
②A/D 轉換誤差: 1/212≈0.025%。
③被控對象即恆溫箱內溫度的不均勻導致誤差。
對於第3 項減少誤差的方法是在箱內安裝風扇增加流動性; 另外, 採取多點測量, 然後取平均值作為溫度測量值。
綜合以上可知, 系統總的誤差小於0.3℃。
5 結論
溫度是工業生產中經常碰到的控制參數之一, 對溫度控制的好壞直接影響產品的質量甚至產品製造的成功與失敗, 因而對溫度的控制具有廣泛的實際應用價值和應用前景。本系統作為一次單片機系統在溫度控制領域的探索和研究, 根據溫度具有非線性、時變性、大滯后等特性, 採用了控制規則自調整模糊控制方法, 結合ATMEL 的89C51 單片機的應用, 通過硬體的設計、調試以及PC 機(上位機) 和單片機(下位機) 的軟體的編程調試, 基本開發出了人機界面友好的模糊自適應溫度控制器。
[admin via 研發互助社區 ] 基於單片機的模糊溫度控制器的設計已經有3167次圍觀
http://cocdig.com/docs/show-post-44641.html
