在利用單片機開發各種嵌入式應用系統時,非同步串列通信是常用的一種通信模式,有的應用中還要求實現多路非同步串列通信。人們平時所應用的各種廠商的單片機,絕大部分片上只提供一個UART(通用非同步收發器)硬體模塊,利用它可以方便地實現一路串列通訊。PIC系列單片機也不例外,在其豐富的一系列產品中,除高端系列(PIC 17/18)一些型號片上帶有2路UART硬體模塊外,其他大部分型號片上只有1路UART,一些低端廉價的PIC單片機甚至還不帶硬體UART。為了提高系統的性價比,要求設計者用軟體實現1路或多路非同步串列通信。很多人對用軟體實現的UART在可靠性和效率方面持懷疑態度,其實關鍵問題是採用何種方式來實現可靠的UART功能。
1 串列非同步通信的基本協議
1.1 起止式協議的原理
起止式非同步協議是串列非同步通信的基本協議,特點是逐個字元傳輸,並且傳送單個字元總是以起始位開始,停止位結束,字元之間沒有固定的時間間隔要求,它的數據格式是靠起始位和停止位來實現字元界定的,故稱為起止式協議。
起止式協議的格式定義為:對於一個完整的字元信息,必須包括起始位、若干數據位、奇偶校驗位和停止位;必須定義每位信息的時間寬度—— 每秒發送的信息位個數,即為波特率。單片機系統中常用的波特率為300 bit/s~19200 bit/s。當波特率為1200 bit/s時,每個信息位的時間寬度為1/1200≈833(us);無數據通信時,數據線空閑狀態應該是高電平,起始位為低電平,數據位低位先發且後跟奇偶校驗位(若有),停止位為高電平,如圖1所示。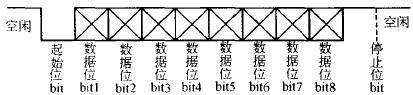
圖1 起止式串列非同步通信的格式
1.2 起止式協議的優劣
起止式協議是按字元傳輸的,每傳輸一個字元,就用起始位來通知收方,以此來重新核對收發雙方同步。若接收設備和發送設備兩者的時鐘頻率略有偏差,這也不會因偏差的累積而導致錯位,加之字元之間的空閑位也為這種偏差提供一種緩衝,所以該非同步串列通信的可靠性高。但由於要在每個字元中加上起始位和停止位這樣一些附加位,使得傳輸效率變低,只有約80%。因此,該通信協議一般用在數據速率較慢的場合(小於19.2 kbit/s)。在高速傳送時,一般要採用同步協議。
按圖1最基本的非同步串列通信時序,軟體實現UART在不同架構的單片機上有多種方法。其中數據接收是關鍵,因非同步通信沒有可參照的時鐘信號,發送方隨時都可能發送數據,任何時刻串列數據到來時,系統都應該及時準確地接收。比較而言,本機發送串列數據相對容易,只要對發送出去的電平做持續時間的定時即可。按不同的接收技巧並針對PIC單片機的特點,下面介紹一種常用且十分可靠的方法——三倍速採樣法。
2 三倍速採樣法
2.1 三倍速採樣法的實現
三倍速採樣法就是以3倍于波特率的頻率對接收引腳Rx進行採樣,保證檢測到起始位,又可以調整採樣的時間間隔;將有效數據位的採樣點控制在碼元的中間1/3處,最大限度地減少誤碼,提高接收的準確性。將圖1的起始位和部分數據位放大,如圖2所示,把每個信息位分成三等份,每等份的時間寬度設為t ,以便於分析。
圖2 三倍速採樣法格式
以三倍頻對信息位進行採樣時,每個信息位都可能被採樣到3次。當處於空閑狀態並檢測起始位時,最早檢測到起始位低電平的時刻必將落在S0陰影區,雖然每次具體的採樣點會在此S0陰影區隨機變化。檢測到起始位低電平后,間隔4ts時間,正好是第1位數據位的中間1/3處(圖2中Ds陰影區)。此後的數據位、校驗位和停止位的採樣間隔都是3ts ,所有採樣點均落在碼元的中問1/3處,採樣數據最可靠。
PIC單片機採用此法實現軟體UART時,硬體上只需要任意定義兩個I/O引腳,分別初始化成輸入(串列數據接收)和輸出(串列數據發送)即可。軟體上只要實現定時採樣,定時時間間隔在中檔以上有中斷機制的單片機上可以用不同的定時器(TMR0、TMR1、TMR2等),通過定時中斷實現;在低檔無中斷的PIC單片機上可以控制每次主循環所耗的時間來實現。對於1200 bit/s波特率,碼元寬度為833us,採樣時間間隔即為278us。整個串列接收或發送是一個過程式控制制問題,用狀態機方式實現最為高效簡易。圖3給出了串列接收的參考狀態機轉移過程。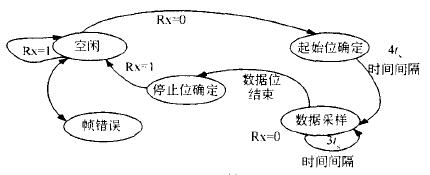
圖3 狀態機轉移流程
接收端空閑狀態為高電平,當收到低電平確認為起始位后,間隔4ts採樣第1個數據位,然後每間隔3ts採樣其它數據位,最後接收高電平確認停止位,數據接收完后回到空閑狀態。如果起始位或停止位確認不對,程序均轉入幀錯誤執行,回到空閑狀態重新接收。
2.2 三倍速採樣法實際應用
文中對中檔單片機PIC12F675進行了軟體非同步串列通信設計,在程序設計中,關鍵部分是TMR0的中斷服務。當通信波特率為1200 bit/S時,TMR0採用278us左右中斷一次,TMR0的中斷響應就為軟體UART接收和發送通信過程的實現。通過MPLAB高效的代碼編譯后,約有150條單字指令代碼,整個中斷服務平均用約35個指令周期,實現一路軟體UART在4 MHz工作頻率下佔用MCU約12%的運行帶寬,通信過程比較可靠。理論上,只要保證MCU留有足夠的運行帶寬給其他任務,在此中斷服務程序內把接收和發送的代碼再複製1份或多份(數據結構獨立),即可實現多路軟體UART。當然,如果每路的波特率不同,採樣頻率必須是最高波特率的3倍,不同波特率的採樣點間隔要獨立調整。
該方法還在實際產品設計中都得到了很好的驗證 最典型的是紅外線自動抄表系統。該系統採用38 kHz紅外調製,波特率為1200 bit/s的半雙工串列非同步通信。用軟體實現此UART,並利用PIC單片機CCP模塊的PWM輸出38 kHz載波,在單片機外只須一個一體化紅外接收頭和一個紅外發射二極體,即可完成所有設計要求,最大程度地減化了硬體設計,降低了成本,提高了系統的可靠性和性價比。
3 結束語
綜上所述,三倍速採樣法最大的好處是軟硬體配置靈活、經濟可靠,接收發送的引腳可以任意定義,採樣定時可以用不同的定時器實現,利用同一個定時採樣可以方便地實現多路軟體UART,無需複雜的外圍電路,即可實現可靠的串列非同步通信。但也有些不足,不管有無數據通信,始終佔用MCU運行帶寬,串列通信的波特率不能太高,4 MHz頻率工作的PIC單片機一般只能實現2400 bit/s的全雙工通信。為此,可以通過提高MCU的振蕩頻率來實現高波特率通信,比如PIC單片機工作在20 MHz時,就可實現9600 bit/s;而且其通信可靠性可通過在採樣時刻多次採樣、多種校驗等方法得到進一步提高。
[admin via 研發互助社區 ] PIC軟體串列非同步通信三倍速採樣法設計已經有6570次圍觀
http://cocdig.com/docs/show-post-42058.html
