1 引言
步進電機是一種將電脈衝信號轉換成直線位移或角位移的執行元件。步進電機的輸出位移量與輸入脈衝個數成正比,其轉速與單位時間內輸入的脈衝數(即脈衝頻率)成正比,其轉向與脈衝分配到步進電機的各相繞組的相序有關。所以只要控制指令脈衝的數量、頻率及電機繞組通電的相序.便可控制步進電機的輸出位移量、速度和轉向。步進電機具有較好的控制性能,其啟動、停車、反轉及其它任何運行方式的改
變,都在少數脈衝內完成,且可獲得較高的控制精度,因而得到了廣泛的應用
2 PLC的特點及應用
可編程序控制器fProgrammable Logic Controller)簡稱PLC,是在繼電器控制和計算機控制的基礎上開發出來的,並逐漸發展成以微處理器為核心,把自動化技術、計算機技術、通訊技術融為一體的新型工業自動控制裝置。它具有可靠性高、環境適應性好、編程簡單、使用方便以及體積小、重量輕、功耗低等優點,因此迅速普及並成為當代工業自動化的支柱設備之一。
2.1高可靠性
PLC所有的I/O介面電路均採用光電隔離,使工業現場的外電路與PLC內部電路之間電氣上隔離;各輸入端均採用RC濾波器,其濾波時間常數一般為10~20ms;各模塊均採用屏蔽措施,以防止輻射干擾;採用性能優良的開關電源:具有良好的自診斷功能.一旦電源或其他軟、硬體發生異常情況,CPU立即採用有效措施,以防止故障擴大;簡化編程語言,對信息進行保護和恢復.設置警戒時鐘WDT;對程序和動態
數據進行電池後備。上述措施使PLC有高的可靠性。而採用循環掃描工作方式也提高其抗干擾能力。
2.2通用性強、採用模塊化結構
各個PLC的生產廠家都有各種系列化產品和各種模塊供用戶選擇。用戶可以根據控制對象的規模和控制要求,選擇合適的PLC產品,組成所需要的控制系統。在做應用設計時,一般不需要用戶製作任何附加裝置.從而能使設計工作簡化。為了適應各種工業控制需要,除了單元式的小型PLC以外。絕大多數PLC均採用模塊化結構。PLC的各個部件。包括CPU、電源、I/O等均採用模塊化設計,由機架及電纜將各模
塊連接起來,系統的規模和功能可根據用戶的需要自行組合且擴充方便、組合靈活。
此外PLC具有豐富的I/O介面模塊、編程簡單易學、手段多;安裝簡單、維修方便;速度快等特點,是“機電一體化”特有的產品。
2.3 PLC的應用領域
PLC在工業自動化領域起著舉足輕重的作用.在國內外已廣泛應用於機械、冶金、石油、化工、輕工、紡織、電力、電子、食品、交通等行業。實踐證明80% 以上的工業控制可以使用PLC來完成。PLC可用於邏輯順序控制、過程式控制制、運動及位置控制、數據處理、通信聯網等。使用PLC可實現步進電機的控制.可使步進電機動作的抗干擾能力強、可靠性高。
2 步進電機的控制原理
2.1四相步進電機的控制要求:
(1)能對四相步進電機的轉速進行控制;
(2)可實現對四相步進電機的正反轉控制;
(3)能對四相步進電機的步數進行控制。
2.2運動速度的控制
步進電機的轉速取決於輸入的脈衝頻率。從圖1可以看出,當改變輸入脈衝的周期時,ABCD四相繞組高低電平的寬度將發生變化。這就導致通電和斷電變化的速率發生變化,使電機轉速發生變化。所以調節輸入脈衝的周期就可以控制步進電機的運動速度。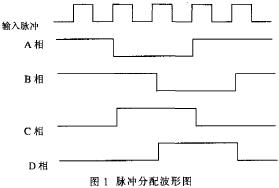
2.3正、反轉控制
步進電機的正、反轉控制可通過改變步進電機各繞組的通電順序來改變其轉向,四相雙四拍步進電機通電順為AB—BC—CD—DA—AB……時電機正轉;當繞組按AD—DC—CB—BA—AD……順序通電時電機反轉.因此,可以通過PLC輸出的方向控制信號改變硬體環行分配器的輸出順序,或經編程改變輸出脈衝的順序來改變步進電機繞組的通電順序實現。
2.4步數控制
步進電機每輸入一個電脈衝就前進一步,其輸出的角位移與輸入的脈衝數成正比。因此可以根據步進電機的輸出位移量確定PLC輸出的脈衝個數,即可實現對步進電機的步數控制。
n=△L/δ
式中△L為步進電機的輸出位移量(mm),δ為機構的脈衝當量(mm/脈衝)。
3 PLC控制系統的設計
步進電機控制的最大特點是開環控制,不需要反饋信號。因為步進電機的運動不產生旋轉量的誤差累積。本系統PLC選用三菱FX2—32MR。其控制系統如圖2所示。
根據要求I/O分配見表1。
4 步進電機電路
4.1步進電機驅動電路
PLC控制步進電機常用的形式有普通型通用PLC控制和PLC專用步進驅動模塊控制等兩種,模塊式控制方式具有控制可靠性高的優點,而通用PLC控制步進驅動系統具有PLC系統構成簡單。工程造價低等優點,易於推廣應用。圖3所示為步進電機的驅動電路。
圖3中僅為一相的驅動電路。其餘三相與之相同.在圖3中三極體T1起開關作用。當三極體截止時,無集電極電流流通,開關相當於斷開;當三極體飽和時,流過的集電極電流最大。開關相當於閉合,該開關“動作”可由加於基極的電流來控制。由T2、T3兩個三極體組成達林頓式功放電路,驅動步進電機的4個繞組.使電機繞組的靜態電流達到近2A。電路中使用光電耦合器將控制和驅動信號隔離。當控制輸入信號為低電平時,T1截止,輸出高電平,則紅外發光二極體截止,光敏三極體不導通.因此繞組中無電流流過;當輸入信號為高電平時,T1飽和導通,於是紅外發光二極體被點亮,使光敏三極體導通,向功率驅動級晶體管提供基極電流.使其導通,繞組被通以電流。
4.2 步進電機的PLC控制方法及程序設計梯形圖(部分)
(1)、轉速控制
由脈衝發生器產生不同周期T的控制脈衝,通過脈衝控制器的選擇,再通過環形分配器使四個輸出繼電器Y0、Y1、Y2和Y3按照雙四拍的通電方式接通。
(2)、正、反轉控制
通過正、反轉驅動環節(調換相序),改變Y0、Y1、Y2和Y3接通的順序.以實現步進電機的正、反轉控制。即
(3)、步數控制
通過脈衝計數器,控制四拍時序脈衝數.以實現對步進電機步數的控制。
系統控制步進電機的梯形圖(部分)如圖4所示。
5 結束語
本文作者創新點是用PLC控制四相雙四拍步進電機的方法簡單易行,可靠性高。由於採用了PLC控制步進電機技術,所以改變控制參數相當方便, 只需改變PLC程序中相應部分即可。對任何相數的步進電機都可以使用,在設計方法上簡單易行.減少佔用PLC的I/O口,與PLC介面時比較方便,這樣在PLC控制步進電機的控制系統中不僅減少了控制系統設計的上作量、大大縮短開發研製周期和節約了開發費用.而且提高了控制系統的柔性和可靠性,具有較高的推廣和實用價值。
[admin via 研發互助社區 ] 基於PLC的四相步進電機控制方法及實現已經有2030次圍觀
http://cocdig.com/docs/show-post-44839.html
