0 引言
步進電機是一種將脈衝信號轉換成直線位移或角位移的執行元件。步進電機的輸出位移量與輸入脈衝個數成正比,其速度與單位時間內輸入的脈衝數(即脈衝頻率)成正比,其轉向與脈衝分配到步進電機的各相繞組的相序有關。所以只要控制指令脈衝的數量、頻率及電機繞組通電的相序,便可控制步進電機的輸出位移量、速度和方向。步進電機具有較好的控制性能,其啟動、停車、反轉及其它任何運行方式的改變都可在少數脈衝內完成,且可獲得較高的控制精度,因而得到了廣泛的應用。
可編程式控制制器(Programmable Logic Controller,通常稱PLC)是適應工業環境,簡單易懂,操作方便,可靠性高的新一代通用工業控制裝置。它能夠完成較精確的位置控制。利用PLC控制步進電機,其脈衝分配可以由軟體實現,也可由硬體組成。本文論述了採用硬體控制的方法。步進電機位置控制系統以三菱FX2N-nMT PLC為主控單元,以步進電機驅動器為驅動單元,以0.6°步距角的三相步進電機為執行單元。通過PI C控制脈衝的發生個數,從而控制步進電機的運轉角度,實現對位置的精確控制。
1 步進電機PLC控制系統I/O接線圖的設計
以三相步進電機為例,步進電機通常設有加速、減速控制及正反轉控制等控制方式。按控制要求可設計出步進電機的PLC控制系統I/O接圖(見圖1)。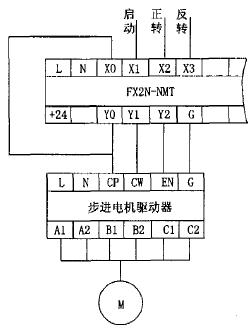
圖1 步進電機的PLC控制系統I/O接線圖
圖中:CP-脈衝信號輸入端子;
CW-方向信號輸入端子;
EN-使能信號輸入端子。
2 步進電機脈衝頻率的變化規律
步進電機在啟動和停止時有一個加速及減速過程,且加速速度越小則衝擊越小,動作越平穩,所以步進電機工作一般要經歷以下的變化過程:加速-恆速(高速)-減速-恆速(低速)-停止。因步進電機轉速與脈衝頻率成正比,所以輸入步進電機的脈衝頻率也要經歷一個類似的變化過程,其變化規律見圖2。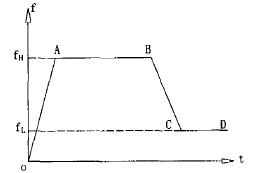
可見在步進電機啟動時要使脈衝升頻,停車時使脈衝降頻。
由於步進電機驅動器在輸入脈衝200 Hz時處於震蕩區內,容易損壞內部元件,而在200 Hz以下運轉速度較慢,效率較低,故一般採用350 Hz作為脈衝的低頻起點。經測試,輕載時高頻脈衝可達到6.8 kHz。
3 FX2N的部分指令簡介
斜坡信號
預先將初值與目標寫入數據寄存器D1、D2,啟動后,D3內容從D1到D2慢慢變化,移動時間為N次掃描,傳輸完畢后M8029置ON。
脈衝輸出
S1指定頻率,2~20 Hz執行中可更變。S2指定發生脈衝。D指定脈衝輸出Y的地址號脈衝占空比為50 ,執行完畢M8029置ON,DPLSY 為32位指令
4 控制系統的部分程序指令
LD M800 //運行監視 SUB D2D5D7
SET M8039 SET M30
MOV K4D8039 //設定恆定掃描周期為4秒 LD M30
LD X2 //正轉 RST M20
OR M10 RAMP D9D4D10K40 //變頻
ANI X3 RST M8029
OUT M10 //反轉 DPLSY D10D2Y0 //脈衝輸出
LD X3 OUT C235D7 //監測降額起點
OR M11 AND M8029
ANI X2 RST C235
RST Y1 LD C235
OUT M11 MOVP D4D9
MUI DOK8D2 MOVP K350D4
SET Y2
SET M20
LD M20
MOVP K6500D4
MOVP K1100D5
5 結論
利用可編程式控制制器可方便地實現對電機的速度和位置進行控制,可靠地實現各種步進電機的操作,完成各種複雜的工作。它是一種先進的工業自動化設備,可廣泛地在造紙、食品、包裝以及其他輕工機械中得到應用。
[admin via 研發互助社區 ] 步進電機PLC控制的研究設計已經有3097次圍觀
http://cocdig.com/docs/show-post-44814.html
