CAN匯流排-控制器局部網(CAN)國際標準(ISO11898)。CAN匯流排與一般的通信匯流排相比,它的數據通信具有突出的可靠性、實時性和靈活性。其特點可概括如下:CAN為多主方式工作。在報文標識符上,各節點分成不同的優先順序。採用非破壞匯流排仲裁技術。只需通過對報文的標識符濾波即可實現點對點、一點對多點方式傳送接收數據。直接通信距離最遠可達零10km(速率5kbps以下);通信速率最高可達到1Mbps(此時通訊距離最長為40m)。CAN上的節點數主要取決於匯流排驅動電路,目前可達110個。報文採用短幀結構,傳輸時間短,受到干擾的概率低。每幀信息都有CRC校驗及其他檢錯措施,具有極好的檢錯效果。通信介質可為雙絞線、同軸電纜或光纖,選擇靈活。節點在錯誤嚴重的情況下具有自動關閉輸出功能,使得其他節點的操作不受影響。它具有較高的性能價格比。CAN協議是建立在國際標準組織的開放系統互聯模式基礎上的,由於CAN的數據結構簡單,又是範圍較小的區域網,因此不需要其他中間層,應用層數據直接取自數據鏈路層或直接向鏈路層寫數據。結構層次少,有利於系統中實時控制信號的傳送。
本實驗通信網路通過CAN匯流排傳輸數據,設計的CAN-RS-232通信適配卡,可掛接在通信網路的任一節點位置,對於通過RS-232匯流排連入CAN網路的PC,可用WINDOWS自帶的超級終端或者我們用VC編寫的串口操作程序來接收和發送數據,可以實現點對點,及一點對多點的通信,實現CAN協議里的數據幀和遠程請求幀的傳送所謂遠程請求幀就是接收端通過發送遠程幀啟動其資源節點傳送它們各自的數據,板卡還可實現10位精度的A/D轉換並將得到的數據通過CAN匯流排上傳給上位機CAN匯流排系統結構如圖1所示: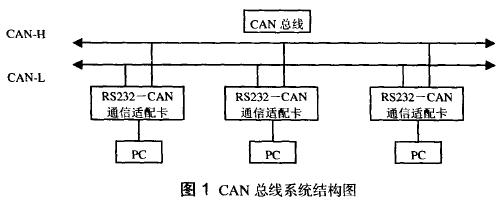
1系統硬體設計
板卡電路主要由四部分組成:PIC16F877A單片機、獨立CAN通信控制器SJA1000T、CAN匯流排驅動器TJA1050和RS-232匯流排驅動器MAX232。主要實現基於CAN匯流排的數據傳輸,同時通過RS-232把Pc作為終端接人CAN匯流排以及採集模擬信號並通過CAN匯流排上傳給上位機。SJA1000T是集成的獨立CAN控制器(與PHILIPS早期的CAN控制器PCA82C200完全兼容),它負責完成CAN匯流排通信協議的物理層和數據鏈路層的功能。對於微處理器來說,它相當於一個存儲器I/O 映象設備。由於CAN控制器和微控制器內部都有自己的時鐘產生電路,為了讓兩者之間協調,外加了10M 晶振在微控制器上作為整個系統的時鐘,並將微控制器的時鐘輸出作為CAN控制器的時鐘輸入;SJA1000T的中斷輸出信號/INT接到單片機的INT中斷,但也可通過查詢方式實現單片機與CAN控制器的通信;為了使CAN控制器和微控制器能同時可靠的複位,外加了手動複位電路。
PIC16F877A單片機是目前使用非常廣泛的中端單片機,在本系統中,它主要是用於控制CAN控制器SJA1000T,對SJA1000T進行初始化和讀/寫操作以及將從CAN匯流排或從RS-232匯流排傳來的數據進行打包處 后再轉傳到RS-232匯流排或CAN匯流排上,即對兩個匯流排上的數據流按照協議進行處理和傳送。下位機的單片機主要是採集模擬信號並實現A/D轉換,並通過CAN匯流排上傳給上位機。
1.1 CAN通信模塊
SJA1000T的AD0~AD7是地址、數據複合匯流排,與PIC16F877A的PORTD埠相連,即單片機通過SJA1000T的這個並口來傳遞數據和地址;需要注意的是51系列的單片機有專門的讀、寫和地址鎖存的引腳,而PIC16F877A並沒有,所以我們只能用其他埠來模擬控制,在本系統中SJA1000T的ALE、CS、RD 、WR分別與單片機的RC0-RC3引腳相連,即用RC0-RC3來控制SJA1000T的地址鎖存、片選和讀/寫操作。
TJA1050是CAN 協議控制器和物理匯流排之間的介面,主要應用在波特率範圍從60kbps到1Mbps。TJA1050可以為匯流排提供差動的發送功能,為CAN控制器提供差動的接收功能,而且完全符合ISO11898標準。CAN控制器SJA1000T通過一條串列數據輸出線TxD 和一條串列數據輸人線RxD 連接到CAN匯流排驅動器TJA1050,而TJA1050則通過兩個有差動接收和發送能力的匯流排終端連接到CAN匯流排。匯流排終端為120歐的電阻,其作用為匹配匯流排阻抗,提高數據通信的抗干擾性及可靠性。CAN通信模塊的原理圖見圖2。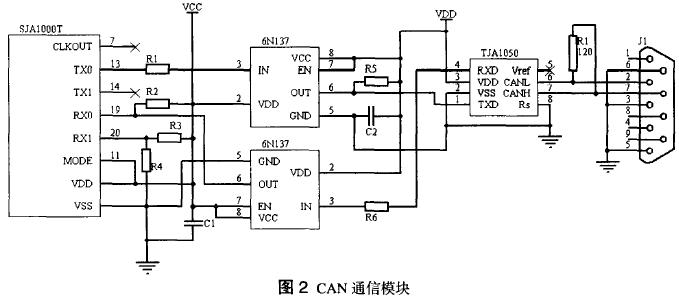
1.2 RS-232模塊
RS-232標準是美國EIA電子工業聯合會制定的一種串列物理介面標準,廣泛用於汁算機與終端或外設之間的近端連接 完整的RS-232介面有25根線,一般在計算機串口採用簡化的9芯插頭座:工作時,應保證電平在±(5-15)V之問。因此為了能夠同計算機或控制器的TTL器件連接,必須在RS-232與TTL電路之問進行電平和邏輯關係的變換。常用的轉換晶元是MAX232。MAX232內部有電壓倍增電路和轉換電路,只需5V電源便可實現TTL電平與RS-232電平轉換。RS-232模塊的原理圖見圖3。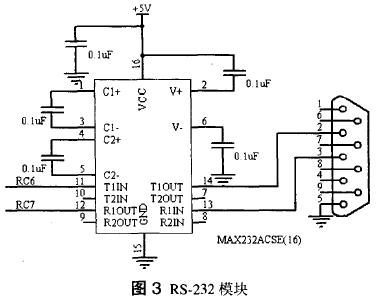
1.3 A/D轉換模塊
PIC16F877A單片機自帶有8路模擬通道,轉換精度為10位。本適配卡選擇RA0為模擬通道。板卡將A/D轉換后的數據通過CAN匯流排上傳給上位機。
1.4 數據流
CAN-RS-232的數據流圖見圖4。
2 系統軟體設計
軟體設計分為兩大塊:板卡底層軟體設計和PC機上串口操作軟體設計。板卡底層軟體設計主要是對PIC16F877A編程,用於把從PC機通過串口輸人給單片機的數據按照CAN協議幀結構進行打包處理,並操作CAN控制器把數據發送到CAN匯流排;把從CAN匯流排上輸入的數據轉換成串列數據輸出給PC機:PC機上串口操作軟體設計主要是對串口的操作和通過串口收發數據。
2.1單片機編程
開發工具使用的是MPLAB集成開發環境(IDE),它是綜合的編輯器、項目管理器和設計平台,適用於使用Microchip的PICmicro系列單片機進行嵌入式設計的應用開發;編程語言用的是C語言,將HITECH 公司的PICC編譯器直接掛接在MPLAB-IDE集成開發平台下,實現一體化的編譯連接和原代碼調試。
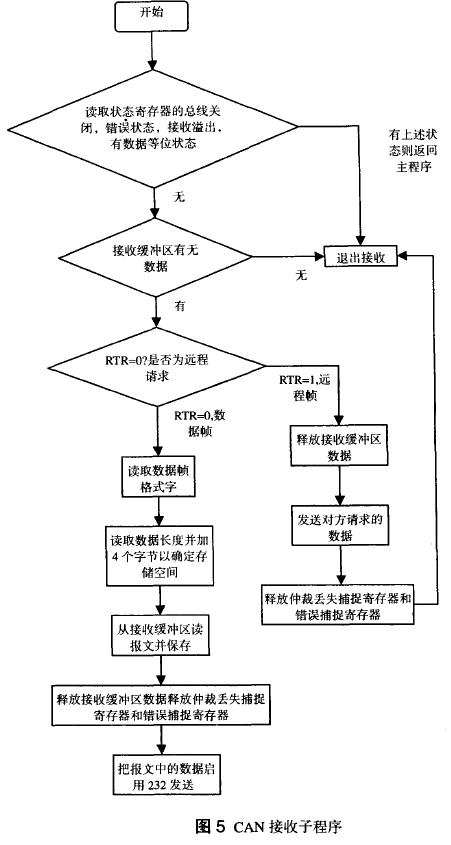
CAN控制器SJA1000T片內有模式寄存器MOD、命令寄存器CMR、狀態寄存器SR、中斷寄存器IR、中斷使能寄存器IER、接收緩衝器RXB、發送緩衝器TXB、仲裁丟失捕捉寄存器ALC、錯誤代碼捕捉寄存器ECC、錯誤報警限額寄存器EWLR、錯誤計數寄存器ERR、驗收代碼寄存器ACR、驗收屏蔽寄存器AMR、匯流排時序寄存器BTR、輸出控制寄存器OCR和時鐘分頻寄存器CDR等,單片機就是通過讀寫這些寄存器來實現對SJA1000T的控制,從而實現CAN報文的接收和發送。文後給出CAN控制器SJA1000T初始化和接收子程序的流程圖。下面給出CAN初始化程序,其中WRCAN是自定義的一段對SJAIO00T寫數據的子程序。
void CANINI()
{WRCAN(MODE,0x09);//進入複位模式,選擇單向濾波方式,對SJA1000T進行初始化
WRCAN(CDR,0x88);//選擇PeliCAN模式,關閉CLKOUT
WRCAN(IER,0x0D);//中斷允許寄存器
//以下根據需要對屏蔽寄存器賦初值,將位設為1表示DON'T CARE,設為0表示CARE
WRCAN(AMR0,0x00);
WRCAN(AMR1,0x00);
WRCAN(AMR2,0xFF);
WRCAN(AMR3.0xFF);//因為AMR3的最低兩位是不用的,必須置“1”
//以下根據情況為驗收代碼寄存器賦初值
WRCAN(ACR0,0x00);
WRCAN(ACR1,0x00);
WRCAN(ACR2,0xFF);
WRCAN(ACR3,0xFF);//ACR,AMR各位設為1,是為了允許任何數據通過濾波器的驗收
WRCAN(BTR0,0x03);//匯流排定時寄存器
WRCAN(BTR1,0xFF);//設置波特率為50kbps
B=fXT/[2*BRP*(1+Tseg1+Tseg2)]
WRCAN(OCR,0xAA);//輸出控制寄存器
WRCAN(RBSA,0x00);//接收緩存寄存器FIFO的起始地址為0
WRCAN(TXERR,0x00);//清除發送錯誤寄存器
RDCAN(ECC);//清除ECC,因為ECC是只讀不能寫的,當被讀出時,其相應位即被清除
WRCAN(MODE,0x08);//設為單濾波方式,並返回工作狀態
return; }
void WRCAN(address,data)//向SJA1000T的寄存器寫入數據
unsigned char address;
unsigned char data;
{PORTC=0x0D;//RC3=1;RC2=1;Rc1=0;RC0=1;即ALE置1,則鎖存地址,其餘埠參考時序圖
PORTD=address;
PORTC=0x04;//RC0=0;RC1=0;RC2=1;RC3=0;即ALE置0,則傳輸據.進入寫方式,其餘埠參考時序圖
PORTD=data;//將數據寫入埠D
PORTC=0x0E;//RC3=1;RC2=1;RC1=1;RC0=0;各埠還原
}
2.2 串口操作程序設計
在各種開發工具中間,VC由於功能強大和靈活,所以本實驗系統使用VC作為開發工具。串口通訊目前流行的方法主要有3種:一是利用Microsoft提供的CMSCOMM控制項進行通訊,通過插入ActiveX控制項的方式實現;二是利用WIN API函數進行編程,這種編程的難度較高,要掌握較多的API函數;三是利用現在網路上面提供的一些串口通訊控制項進行編寫,比如CSerial類等。本程序採用WINAPI函數進行串口的開發,程序在PC機上用來收發串口數據運行正確穩定。
3 結束語
本系統在PC機上使用串口通信程序收發RS-232匯流排上的數據,並通過PIC單片機和CAN通信模塊連人CAN網路。板卡可進行雙向通信:一方面可以把從CAN匯流排接收的數據流轉換成標準的RS-232格式的數據流上傳給PC機;另一方面可以把接收的RS-232格式的數據流轉換成符合CAN協議的報文結構傳送到CAN匯流排上。充分利用了CAN匯流排組網的優勢,構成的匯流排型通訊網路具有通訊波特率高、通訊距離長、節點容量大、可靠性高等特點。利用VC編程的串口通信程序接收顯示和發送數據,實現了多主機基於CAN網路的數據通訊。
[admin via 研發互助社區 ] 基於PIC單片機的RS-232轉CAN通信適配卡設計已經有2808次圍觀
http://cocdig.com/docs/show-post-42191.html
