TMS320F28x(簡稱"F28X")數字信號處理器是TI公司推出的32位定點DSP控制器,其頻率高達150 MHz,大大提高 控制系統的精度和晶元的處理能力。在F28X系列DSP上移植實時操作系統,需要對編譯器、系統啟動過程、中斷處理過程以及整體代碼執行流程有一個全面的深入理解。對系統的整個運行過程有清晰的概念是移植實時操作系統的前提條件。本文將對從DSP上電複位到其系統功能實現的整個運行過程進行深入介紹,並在此基礎上進一步分析在F28X系列DSP上移植實時操作系統一般原理,詳細說明uC/OS II的移植。
1 BootROM及其運行
在F281x、C281x、R281x器件中都有一塊4K×16位的BootROM。當引腳MP/nMC的狀態反映到XINTCNF2中為0時,BootROM 被映射到地址空間0x3FF000~0x3FFFC0上。片上ROM 在出廠前就已經燒寫好了一個啟動程序以及一些其他數據和表格(版本信息、複位向量、中斷向量表、IQmath表等)。其空間分配如圖1所示。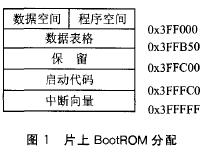
其中,中斷向量表在VMAP=1、ENPIE=0(PIE未使能向量表)、MPNMC=0時有效。另外,當VMAP=1、ENPIE=0時.系統將從BootROM 的0x3FFFC0複位。雖然複位后ENPIE為零,但大部分系統都是需要使能外部中斷擴展模塊的,即用戶程序中需要將ENPIE置1。由此可見,BootROM 唯一常用的向量只有複位向量;而其他的中斷向量是指向MOSRAM 用於晶元測試的,通常用不到。狀態位和向量表映射關係如表1所列。
2 從上電複位到用戶代碼
當系統重啟(上電或熱啟動)時,引腳XMPNMC的信號將被鎖存到XINTF的配置寄存器XINTCNF2中。重啟之後,XMPNMC的狀態不再反映到XINTCNF2,這時,可以用軟體來修改它的狀態,從而確定程序要訪問的是內部地址還是外部地址。但是,像F2810這樣的器件,沒有XINTF,它的XMPNMC在晶元內部被拉低,也就是說,當器件重啟后,它總是自動從內部的BootROM 啟動。如果XMPNMC為高電平,則表示系統將從XINTF zone7中獲取複位向量。即從外部獲取中斷向量(地址見表1)時,必須確保複位向量所指向正確的地址。這一般在希望自己編寫啟動程序時使用。本文對此不作具體討論。
當XMPNMC為低電平時,系統從內部獲取複位向量。這個複位向量指的就是上文中提到的BootROM 中位於0x3FFFC0的向量。此向量指向固化在BootROM 中的InitBoot函數。所以上電複位后,程序將跳轉到InitBoot函數。
InitBoot函數首先對器件初始化,F281X器件將被配置為F28x工作模式。如果希望執行C2xLP兼容程序,則需要用戶自己寫程序配置。PLL 配置將保持不變。PIE使用預設狀態,即不使能。另外要注意,M1的前80個字將用做BootROM 的堆棧.用戶應避免使用。初始化完成後,程序轉向執行SelectBootMode函數。此函數將掃描
通用I/O口(GPIO),以確定啟動模式,如表2所列,包括跳轉到Flash、跳轉到H0 SARAM、跳轉到OTP等模式。
不同的模式有不同的程序起點(entrypoint)。對於Flash、H0 SARAM、OTP模式,有一個固定的跳轉地址(見表2);而對於從SCI、SPI啟動時,程序起點將調用bootloader按一定的格式從外部獲取。
最後,BOOtROM 執行exitboot函數。執行這個函數包括:置CPU狀態為預設,將SP指向0x400,跳轉到程序起點等工作。exitboot執行后CPU 狀態為:ACC=0,RPC=0,P= 0,XT=0,ST=0,XAR0=XAR7=0,SP=0x400,ST1=0x0A0B。
以上是BootROM 完成的工作。從entrypoint開始,就進入用戶程序區了。對於彙編程序,可以在程序起點處寫一條跳轉到Start(如果程序起點是Start)的指令。彙編情況比較簡單,跳轉到Start后,各項初始化代碼工作都由自己完成。對於C語言程序,通常的做法是在程序起點處放置一條跳轉指令,轉到_c_init0。然後程序的執行分為使用或不使用BIOS兩種情況。
從rts.src中提取boot28.inc文件,其中包括對於不使用BIOS的情況下,啟動后從_c_init0到main函數中間所做的工作。因為這段代碼是由C編譯器自動運行的,因而常被初學者忽視,以致對其後自己編寫的C代碼的運行環境不清楚。這一段程序主要完成以下工作:
這段代碼聲明了2個全局變數:_stack,系統堆棧棧底;_c_int00,啟動函數。下面列出了C運行環境的初始化程序部分代碼:
C28OBJ ;選擇C28x對象模式
C28ADDR ;清除地址模式位
C28MAP ;設置MOM1模式
CLRC PAGE0 ;使用堆棧定址模式
MOVW DP,#0 ;初始化DP指向低64K地址
CLRC OVM ;關閉溢出模式
ASP ;確保SP對齊
這些代碼設置了C語言的運行環境。在用戶程序中編寫的彙編代碼不應該破壞這個環境,否則C語言將無法正常運行。
3 中斷代碼的執行
F28x系列的DSP支持1個不可屏蔽中斷(NMI)和16個可屏蔽中斷(INT1~INT14、RTOSINT、DLOGINT)。其中,INT1~INT12由PIE控制單元管理。每個INT可以對應8個外設中斷,即PIE可以控制96個中斷源。下面對可屏蔽中斷響應過程作一介紹:
由於置位了INTM、DBGM,所以可屏蔽中斷默認是不被允許的。如果要嵌套,則需程序員自己動手清除禁止中斷標誌。另外,中斷裡面LOOP、EALLOW 、IDLESTAT都被清零了,這樣中斷服務子程序有了一個全新的上下文。
4 從RAM 中執行代碼
通常情況下,程序是保存在Flash裡面的,CPU從Flash中取指運行;但是,有時會要求將程序調到RAM 中來執行。一方面是為追求更高的速度;另一方面是為了讓Flash有最好的運行性能,需要修改Flash的等待狀態周期,使能Flash Pipeline,而對Flash的操作必須在RAM 裡面執行,這些操作函數就必然要從Flash中調到RAM 中執行。對於這些程序,在啟動後用戶程序中需要先完成存儲器拷貝工作。拷貝到RAM 中之後,才能調用這些函數,順序不能亂。
5 在DSP上移植實時操作系統
所謂移植,就是使一個實時內核能在某個微處理器或微控制器上運行。在移植軟體之前,先要正確配置處理器的運行模式,了解處理器的中斷方式、中斷向量地址等。這些工作在F28x系列DSP中由BootROM 中固化的程序完成。另外,為了方便移植,大部分的RTOS代碼都是用C語言寫的;但仍需要用C語言和彙編語言混合編寫一些與處理器相關的代碼。這是因為在讀寫處理器寄存器時只能通過彙編語言來實現。
對於同時使用彙編語言和C語言的實時操作系統移植,必須小心使用彙編語言,防止破壞C語言運行環境。一方面不可以改變相關狀態位;另一方面彙編函數的編寫需要遵循C編譯器的調用規則。從複位到用戶程序編譯
器做的設置工作見前文。
中斷髮生時,TMS320LF28x處理器自動保存了不少寄存器,但是如果中斷服務子程序中要用其他寄存器,那麼開始時要自己寫現場保護程序。就實時操作系統而言,進入中斷和退出中斷須對系統堆棧進行現場保護。維護堆棧結構時,需要注意處理器堆棧的生長方向。雖然絕大多數微處理器和微控制器的堆棧是從上往下長的,但TI公司的DSP一般為從下往上長。
一般實時操作系統需要先禁止中斷再訪問代碼的臨界段,並且在訪問完畢后重新允許中斷。這就使得系統能夠保護臨界段代碼免受多任務或中斷服務常式(ISRs)的破壞。最簡單的實現方法是直接調用處理器指令來禁止中斷和允許中斷。
筆者選擇了目前應用比較廣泛的實時操作系統uc/OS II。要移植uc/OS II需要滿足以下要求:
移植工作包括以下幾個內容:
移植的難點在於實現OS_CPU_A.ASM。這個文件的實現需要十分清楚處理器啟動過程和中斷處理,以及代碼的運行過程。由於TI公司的DSP堆棧從下往上長,所以移植時需要置OS_STK_GROWTH為0。可以簡單地使用TIMS320I F28x的中斷使能和禁止命令來實現OS_ENTER_CRITICAL()、OS_EXIT_CRITICAL()兩個宏。
以下是移植時OS_CPU_A.ASM 文件里任務切換的代碼。任務切換時,須時刻注意自己設計的堆棧結構。
_OSCtxSw:
CALL _CTX_SAVE
LDPK _OSTCBCur ;OSTCBCur->OSTCBStkPtr = SP
LAR AR3,_OSTCBCur
MAR *.AR3
SAR AR1,*,AR1
_OSIntCtxSw:
CALL _OSTaskSwHook ;OSTaskSwHook()
LDPK _OSTCBHighRdy ;OSTCBCur=OSTCBHighRdy
BLDD _OSTCBHighRdy,#_OSTCBC ur
LDPK _OSPrioHighRdy ;OSPrioCur=OSPrioHighRdy
BLDD _OSPrioHighRdy,#_OSPrioCur
LDPK _OSTCBHighRdy ;SP=CKSTCBHighRdy->OSTCBStkPtr
LAR AR3,_OSTCBHighRdy
MAR *,AR3
LAR AR1,*
B _CTX_REST,AR1
結語
本文詳細說明了從上電複位開始,DSP中程序運行的過程;分析了固化在片上ROM 的程序以及由編譯器自動生成的程序。另外,通過對DSP/BIOS啟動、中斷執行、從RAM 中執行代碼等問題的探討,了解DSP的運行機制,掌握移植實時操作系統的關鍵技術知識。筆者成功地將實時操作系統uc/OS II移植到了TMS320LF2812數字信號處理器上。
[admin via 研發互助社區 ] TMS320F28x上RTOS移植關鍵技術研究已經有1992次圍觀
http://cocdig.com/docs/show-post-42242.html
