UC3638中文資料
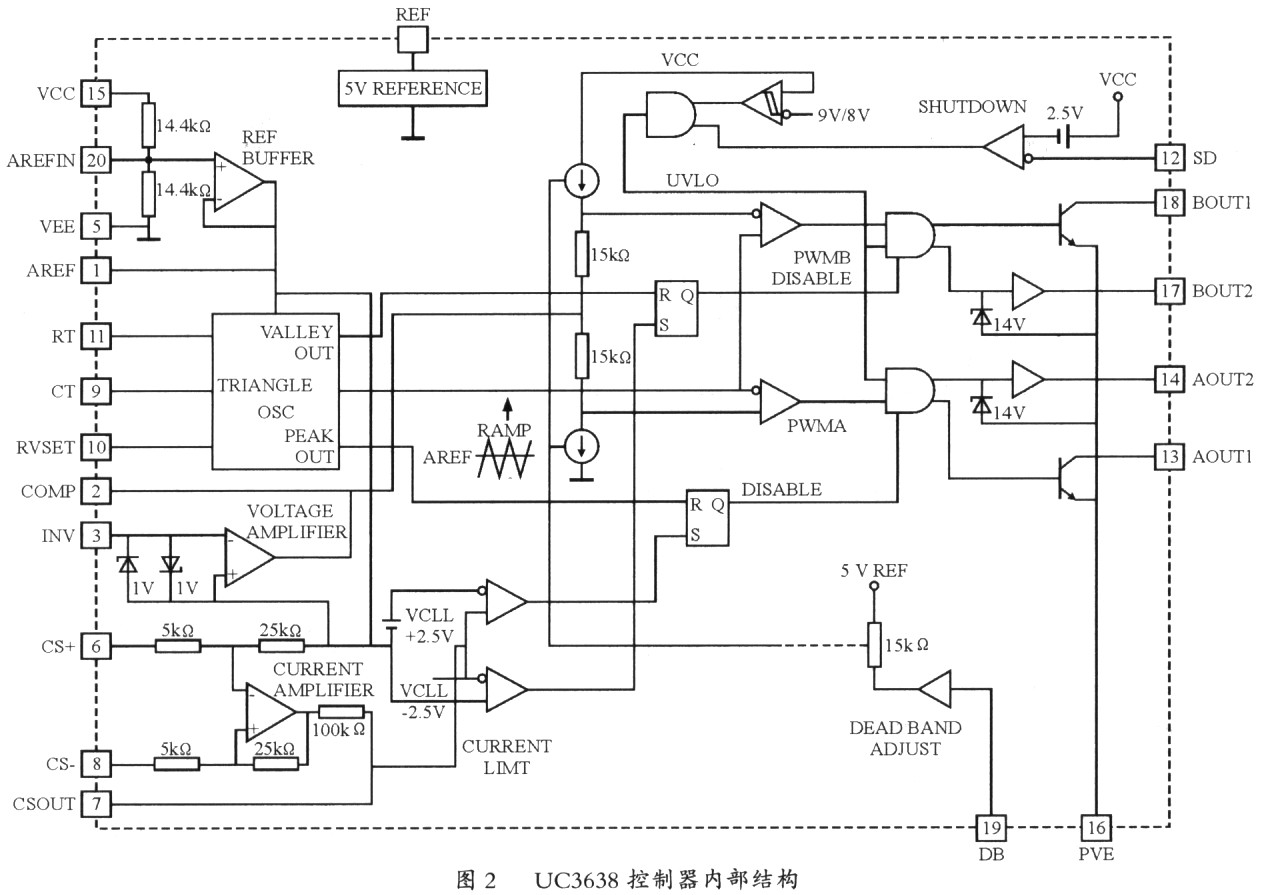
UC3638增強型直流電機PWM控制器,適用於各類直流電機PWM驅動控制,還可用來設計需要單向或雙向電流驅動的功率放大器,其內部結構如圖2所示。它包含有模擬信號誤差放大器和PWM調製器;根據誤差放大輸入信號的極性和大小,PWM調製器輸出兩路不同極性和寬度的脈衝串。因此,它可用於雙向調速系統和其他需要單極性或雙極性可調電壓或電流的場合。由於改進了電路設計和提高了集成度,UC3638減少了許多外圍電路元件。它還有以下特點:電路速度有了顯著提高,內部有可編程高頻三角波發生器,高轉換速率誤差放大器,高速PWM比較器,PWM開關頻率可達500kHz。增加的5倍固定增益差分電流放大器和誤差放大器配合,可構成平均電流反饋控制電路以提高系統響應速度(電流型控制)。兩路60V/50mA集電極開路輸出以驅動全橋上管,兩路500mA圖騰柱輸出可驅動全橋下管。可編程引腳AREFIN允許單電源或雙電源工作。振蕩器斜波幅度和PWM死區經5V分壓,由設置引腳PVSET(振蕩器斜波幅度設置)和DB(PWM死區設置)設定。另外還包括精確的5V參考電壓輸出,欠壓鎖定,雙向逐周峰值電流保護,遙控關斷引腳(可兼做軟啟動)。
3 雙極性電流控制器的原理和設計
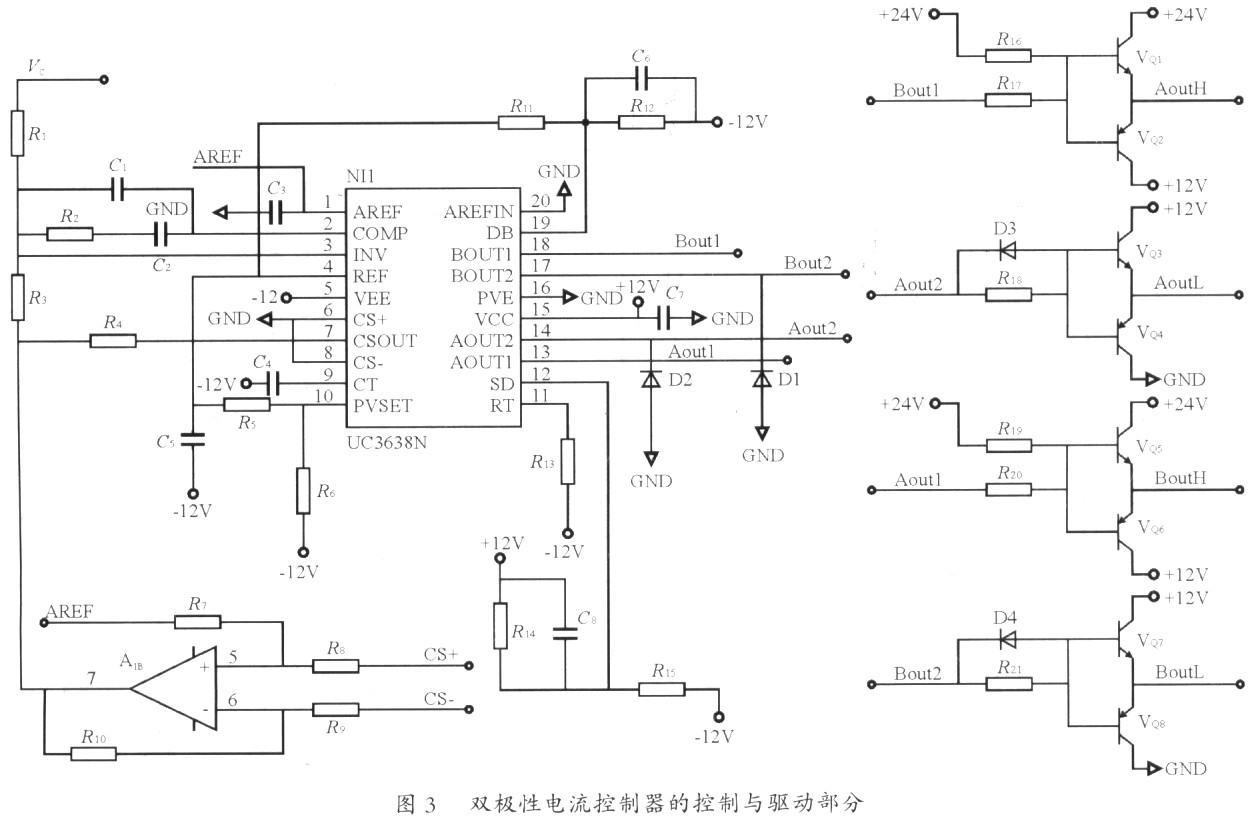
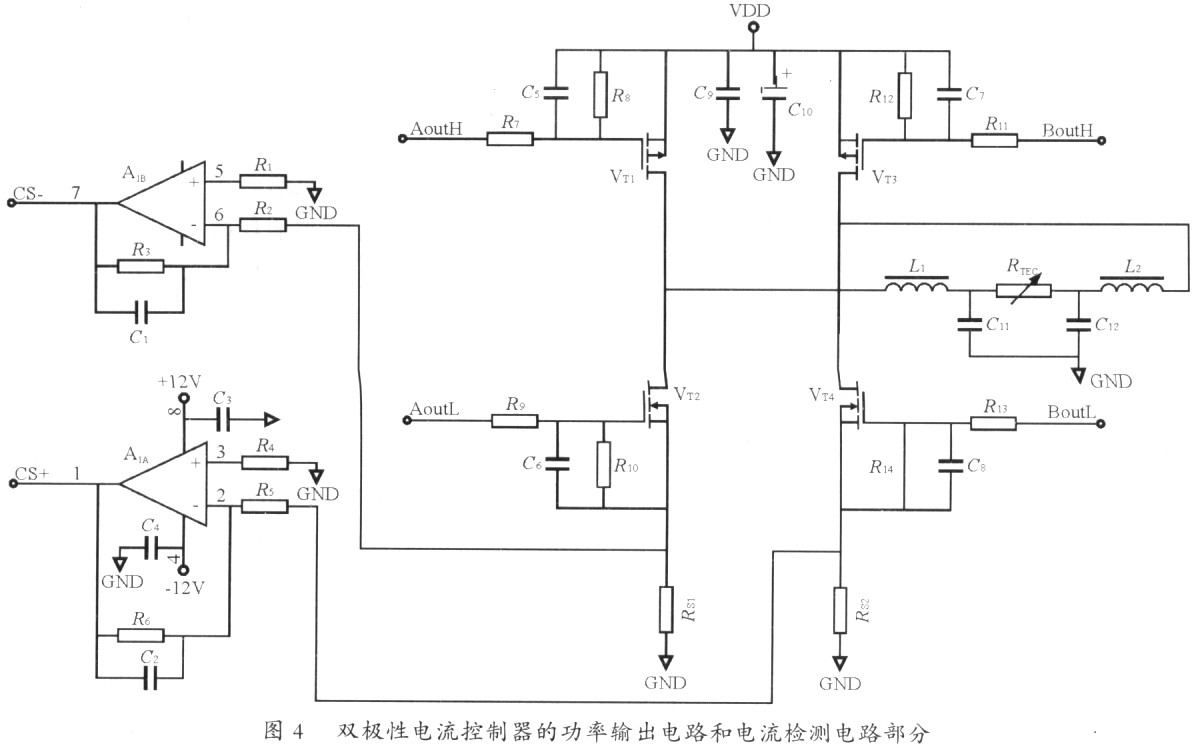
如圖3所示,由隔離放大器的電流控制信號Vc經R1.,同來自外加的差動電流放大器A1B的電流反饋信號經R3相加,經UC3638內部的誤差放大器進行電流PT凋節(R2,C1,C2構成補償網路),再經內部PWM比較器等形成PWM控制信號Aoutl.Aout2,B0utl,Bout2,經VQ1~VQ8形成驅動信號AoutL,AoutH,BoutL,BoutH,驅動圖4中VT1~VT2成的全橋,輸出PWM功率信號,再經L1,L2,C11.C12濾波得到雙極性電流(電壓)對TEC(圖4中RTEC)供電。橋路電流信號由電阻RS1,RS2(實際為多個低阻值電阻並聯)檢測,經A1A,A1B構成的反相放大器放大再送至圖3中的A1B構成平均電流反饋。
3.l UC3638外圍電路設計
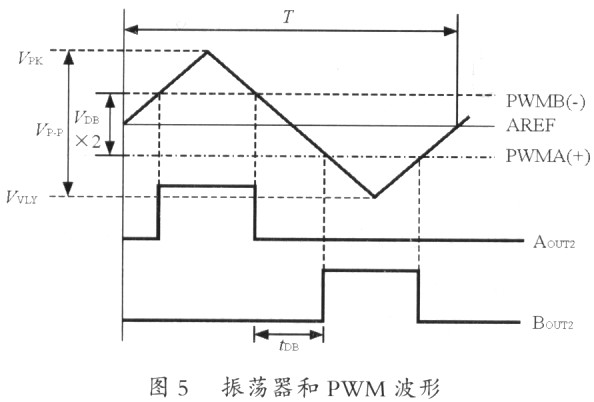
1)如圖3及圖5所示,假設UC3638供電電源為±12V,三角波發生器振幅為10Vp-p,按UC3638的設計要求,腳PVSET的電平按如下設置:VPK一VVLY=5VIPVSET,VIPVSET=VR6=10/5=2 V,取R6為10 kΩ,IR5=IR6=2/(10×lO3)=O.2 mA, R5=(VAREF一VR6)/IR6=(5-2)/(O.2×lO-3)=15 kΩ。R5取信以實際調試為準。
2)如果取1V死區電壓,5-VDB=1V,VDB=4V,取R12為10 kΩ,IR1=IR12=VDB/R12=4/R12=4/10×103=O.4mA.R11=(5-VDV)/IR11=1/(O.4×10-3)=2.5 kΩ。R11取值以實際調試為準。並聯C6在R12上可獲得軟啟動特性(即上電后死區由大逐漸減小)。
3)取VCC一VSD=8V(小於2.5 V進入軟啟動狀態),R14=10 kΩ,IR14=IR15=8/10×l0-3=O 8 mA,R15=(2×VCC-VR14)/H15=(24-8)/(O.8×10-3)=20 kΩ。為現可獲得晶元延遲使能特性:在R14上並聯電容C8.
4)取頻率發生器外接電容C4為1000 pF,由於f/=l/(5×RT×CT),取f=35 kHz,R13=RT=1/(5×f×GT)=1/(5×35kHz×1000 pF)≈5.8kΩ。取R13為6.2 kΩ。當RT=6.2 kΩl時,腳RT的充電電流限制為2.4 V/6.2 kΩ=O 387 mA。小於規定的最大1mA限制。
5)驗算死區時間tDB=VDB/[(VPK-VVLY)×=(5-VDB)×RT×CT/VPVSET=1×6.8 kΩ×1000 pF/2V=3.4μs。可見死區時間遠大於MOSFET的開關時間,實際應用中可根據輸出波形調整R11。
3.2 電流檢測電路設計
在實際應用中,由於需要對多個TEC模塊串並聯使用以提高加熱製冷功率,所以驅動輸出電壓電流較大(最大設計值±24V/20A,實測±25V/17.5A)。為提高效率以減小發熱,我們採用多個低阻值電阻並聯作為電流檢測取樣電阻。這樣,原有UC3638內部的電流檢測差分放大器放大倍數不夠,須外加放大器。但實驗發現,PWM驅動器工作時,由於電路高速開關切換產牛很大的dv/di和di/dt,由此產生共模尖峰電壓,從而引起很大的地線干擾。在採取了減小干擾的各種措施后,因控制器內部的電流限制閾值較低(±2.5V),很容易引起驅動電路自鎖無輸出。於是,我們根據其內部電路通過外加運放(圖3中A1B和圖4中A1A及A1B)的方式實現高倍率的差分電流放大和電平移位(將CS+和CS一短路接地以屏蔽內部差分放大器),並將最後的差分電流放大輸出通過圖3中電阻R4接至CSOUT以實現最大電流限制功能。同時在信號通路上加上小電容以濾除高頻干擾。另外,在MOSFFT柵源極間加電容以減小電路開關切換和密勒電容對柵極驅動信號的不利影響,該措施和死區形成電路一起使驅動器可靠工作,不會發生上下管直通現象,並有效地提高了控制電路的穩定性。
3.3 驅動和全橋電路
採用NPN和PNP互補開關管對PWM輸出控制信號進行放大和電平移位。採用P溝道管IRFl4905作為上管,N溝道管IRF3205作為下管構成全橋電路。值得注意的是,當要求占空比最大值達到l時,不能使用普通的泵電路(常用於驅動N溝道上管)對上管驅動。
3.4 輸出LC濾波電路設計
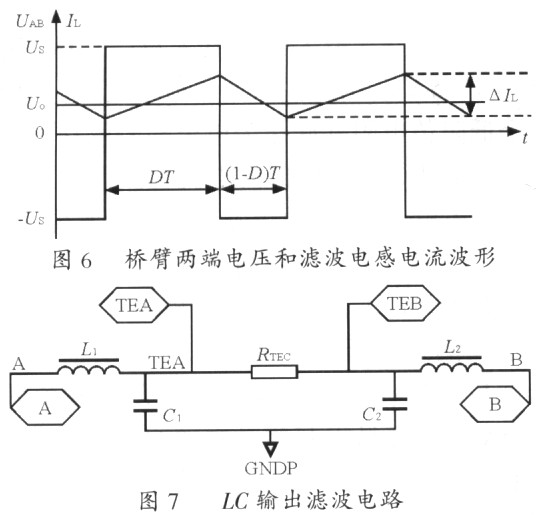
如圖6及圖7所示,設一個周期內TEC兩端電壓Uo近似不變,UAB為橋臂中點間電壓,US為橋臂供電電壓,IL,為電感電流,IOMAX為驅動器最大輸出電流,D為占空比,TS為開關周期,fs為開關頻率,L=L1=L2為濾波電感,C=C1=C2為濾波電容,RTEC為TEC的等效電阻,則由LC輸出濾波電路和橋臂兩端電壓和濾波電感電流波形可得
△It=(US-Uo)DTS/(2L)
=(Us+Uo)9(l—D)Ts/(2L) (1)
因為Uo=(2D一1)Us,
所以△IL=D(1一D)TsUs/L。
當D=0.5時△IL有最大值△ILMAX=Us/(4fsL)。可選擇L使紋波電流△IL,,不大於LOMAX的(10~20)%。由於TEC所能達到的溫差隨紋波電流的增大會減小,其近似的降額公式為
dθ/dθMAX=1/(1+N2) (2)
式中:dθ是TEC在電流有紋波下所能達到的溫差;
dθMAX是TEC在直流電流下所能達到的最大溫差;
N是電流紋波係數,通常製造商要求電流紋波係數不得大於10%。
由於TEC紋波電流的推導較複雜,這裡儀給出文獻里的一個估算公式供參考。

式中:fs為振蕩器的頻率也等於PWM電壓的開關頻率;
L=L1=L2為濾波器的電感量;
C=C1=C2為濾波器的電容量;
RTECTEC的等效電阻;
VTEC為TEC的直流壓降;
ESR為濾波電容的等效串聯電阻;
VS為全橋供電電源電壓。
式(3)表明在濾波電感、供電電壓、模塊等確定的情況下,提高開關頻率、增加濾波電容容量,減小濾波電容的等效串聯電阻可減小電流紋波。當然需要權衡由此增加的電路板面積、功耗等因素來最終確定L、C、fs的值。
4 實驗結果
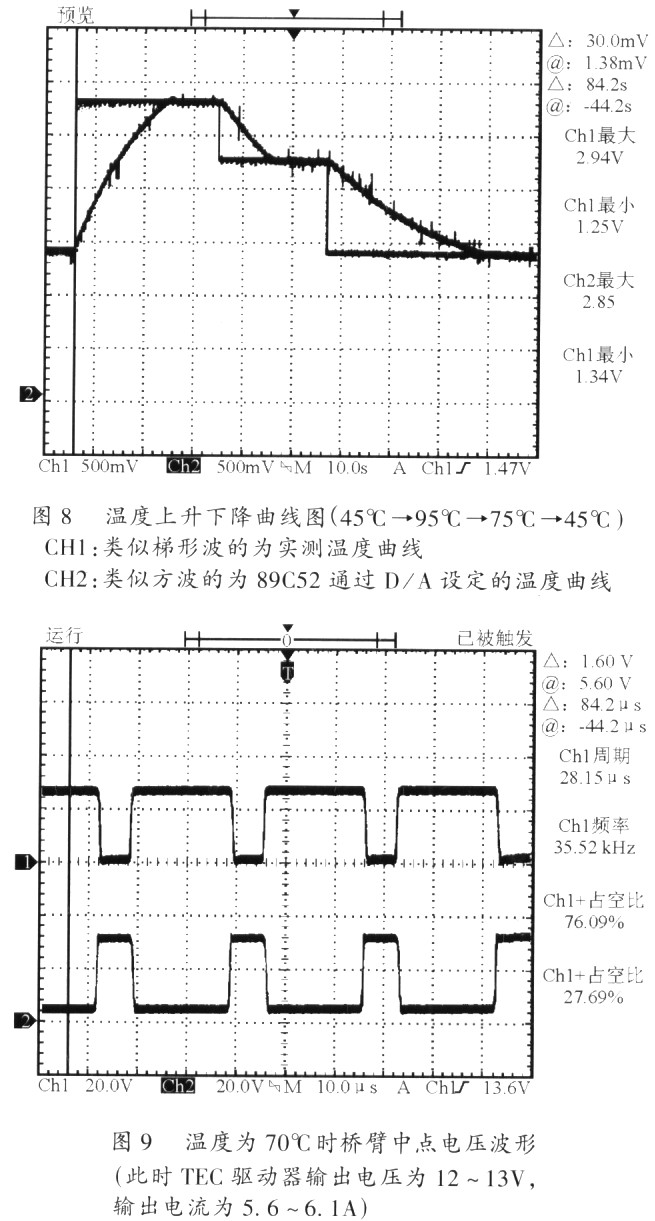
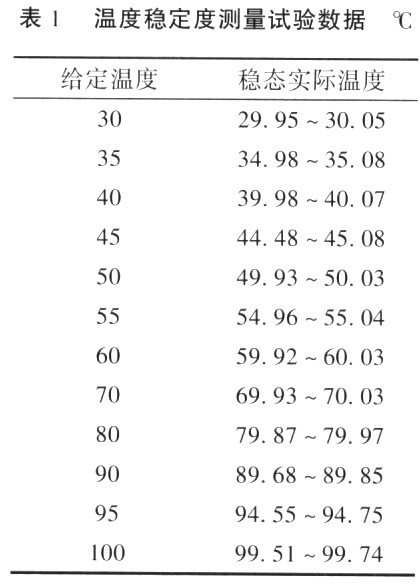
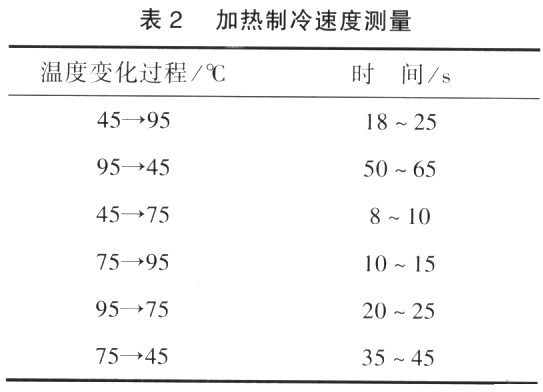
分別對直接電流控制方式(PID由89C52完成)和溫度給定控制方式(PID由模擬電路完成)進行了實驗,發現直接電流控制方式,數字控制演算法較難設計,控制效果並不比模擬PID控制方式好(僅達到±O.3℃)。僅採用適當增益的比例調節器(有差控制),並適當對高頻增益進行衰減,用89C52給定溫度不做任何調節(即數字控制器開環),短期溫度穩定度可達±O.15℃左右,但數字給定溫度開環控制模擬調節存在溫度可能不在設定點上(一方面是相對於上位PC機給定溫度,初始D/A給定值不是很準確,另一方面模擬電路存在漂移),長期穩定度不好,為此我們利用89C52進行數字目標控制,其目的是,即使初始D/A數字給定值不是很準確,差1℃~2℃,通過程序判斷,自動調整89C52送到D/A的數字量,使最終控制溫度達到上位PC機的溫度給定值,實驗發現,在演算法合理的情況下,甚至能提高溫度穩定度。採取以上措施,溫度穩定度小於±O.15℃(若改進演算法應還有提高的可能,實驗中已觀察到這一點,若溫度控制範圍不大更是如此),溫度偏移量(溫度準確度)小於±O.5℃。圖8及圖9,表1及表2是實驗結果。
[admin via 研發互助社區 ] UC3638中文資料已經有3170次圍觀
http://cocdig.com/docs/show-post-37981.html
