步進電機又稱脈衝電動機或階躍電動機,是較早使用的典型機電一體化元件組件 例如,在機械裝置中可以用絲杠把角度變成直線位移,也可以用步進電機帶動螺旋電位器,調節電壓或電流,從而實現對執行機構的控制。步進電機可以直接接收數字信號,不必進行數模轉換,使用起來非常方便,在閥門控制、數控機床、繪圖儀、印表機以及光學儀器中得到廣泛的應用。步進電機、步進電機驅動器構成了步進電機系統不可分割的兩大部分。本文介紹一種實用的三相反應式步進電機驅動電路的設計。
1 應用器件簡介
1.1 PMM8713晶元
PMM8713是由日本Sanyo(三洋)電機公司生產的步進電機控制用脈衝分配器(又稱邏輯轉換器),為雙列直插式16腳單片CMOS集成晶元。PMM8713既可以用於3相控制,又可以用於4相控制。勵磁有1相、2相和1-2相3種方式,通過電路設計可任選其中的一種激勵方式。此外,PMM8713還具有單時鐘或雙時鐘工作方式,帶有正反轉控制功能以及初始化複位功能,其內部有時鐘選通、激勵方式控制、可逆環形計數、激勵方式判斷等電路。
因為PMM8713所有輸入端均採用施密特整形電路,因此抗干擾能力強。輸出電流大於20 mA,可直接驅動微型步進電機。邏輯框圖如圖1所示。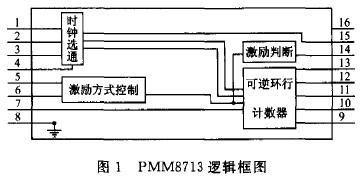
1.2 LM331晶元
LM331是美國NS公司生產的性能價格比較高的集成晶元。LM331可用作精密的頻率電壓(F/V)轉換器、A/D轉換器、線性頻率調製解調、長時間積分器以及其它相關的器件。LM331為雙列直插式8腳晶元,其邏輯框圖如圖2所示。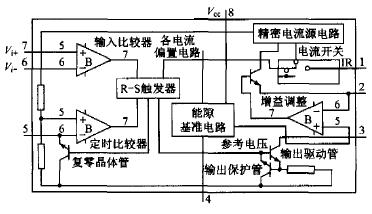
LM331內部有輸入比較電路、定時比較電路、R-S觸發電路、復零晶體管、輸出驅動管、能隙基準電路、精密電流源電路、電流開關、輸出保護電路等。輸出管採用集電極開路形式,因此可以通過選擇邏輯電流和外接電阻,靈活改變輸出脈衝的邏輯電平,從而適應TTL、DTL和CMOS等不同的邏輯電路。此外。LM331可採用單/雙電源供電,電壓範圍為4~40 V,輸出也高達40 V。
1.3 電壓-頻率變換
LM331外接電路簡單,只需接入幾個外部元件就可以方便地構成電壓/頻率(V/F)或頻率/電壓(F/V)變換電路。本文選用LM331的電壓/頻率(V/F)轉換功能.結構如圖3所示。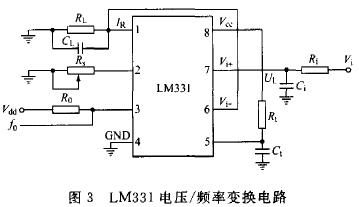
外接阻容Rt、Ct和內部電路構成單穩定時電路。當輸入端Vi+輸入正電壓 時,Vi+大於Vi-,輸入比較器輸出高電平,R-S觸發器置位,輸出高電平使輸出驅動管導通,從而第3腳f0輸出邏輯低電平。同時,電流源IR對電容CL充電。由於復零晶體管的基極接在R-S觸發器的反相輸出端,因此,復零晶體管截止,電源Vcc通過電阻Rt對電容Ct充電。當Uct大於2/3 Vcc時,定時比較器輸入端(第5腳)為正,因而輸出邏輯高電平至R-S觸發器的複位端,使R-S觸發器複位。R-S觸發器正相輸出端輸出低電平使輸出驅動管截止,Vdd通過上拉電阻R0使LM331第3腳f0輸出邏輯高電平。此時,R-S觸發器反相輸出端輸出高電平使復零晶體管導通,電容Ct通過復零晶體管對地放電。電流開關打向左邊,電容CL通過電阻RL對地放電。當電容CL放電電壓等於輸入比較器的正輸入端電壓Vi時,輸入比較器再次輸出高電平,使R-S觸發器置位,輸出驅動管導通,f0輸出邏輯低電平。如此反覆循環,從而在f0端輸出一定頻率的脈衝信號。根據電容上電荷平衡原理和相關電學知識,設電容的充電時間為t1,放電時間為t2。由C=Q/U, I=Q/t,Q放=Q充,可以得至I放t2=I充t1→t2UL/RL=(IR-UL/RL)t1→(t1+t2)= (IRt1RL)/UL;又f=1/T,這裡T=t1+t2,所以:
f0=1/(t1+t2)=UL/(IRt1RL)
UL為電容C 兩端的電壓,因為UL在大約10 mV的範圍內波動,因此,UL=Vi,故:
f0=Vi/(IRt1RL) (1)
從(1)式可以看出,LM331的輸出頻率. f0與輸入電壓Vi成正比,從而實現了輸入電壓和輸出頻率的變換。t1由外接的定時元件Rt和Ct決定,其關係為t1=1.1RtCt,這樣可以依據設計電路的要求相應地選取Rt和Ct的值。 由內部精密電流源提供.IR=1.9 V/Rs。式(1)可變為
f0= ViRs/(2.09RLRtCt) (2)
輸入電阻Ri使7腳偏流抵消6腳偏流的影響,從而減小了頻率偏差。Rs為可調電阻,它的作用是調整LM331的增益偏差。Ci為濾波電容,一般為0.01~0.1 uF,在濾波效果較好的情況下,可使用1uF的電容。當6腳和7腳的RC時間常數匹配時,輸入電壓的階躍變化將引起輸出頻率的階躍變化。為了提高精度和穩定度,阻容元件選用低溫度係數的器件。
2 驅動器電路設計
驅動電路如圖4所示。外接電阻Rt和電容Ct 、內部定時比較器、復零晶體管、R-S觸發器等構成單穩定時電路。當輸入端Vi+輸入的電壓大於Vi-輸入端的電壓時,f0輸出邏輯低電平。同時,電流源IR對電容CL充電。電源Vcc也通過電阻Rt對電容Ct充電。當電容Ct兩端的充電電壓大於Vcc的2/3時,輸出端,f0輸出邏輯高電平。f0信號輸出至PMM8713 晶元的時鐘端,該頻率經PMM8713處理后,在A、B、C腳輸出一定頻率的驅動信號來控制功率三極體的導通時間,從而控制步進電機的轉速。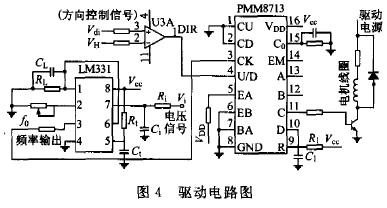
方向控制電路由LM348四電路通用運算放大器構成。外部方向控制信號通過LM348和基準電壓構成電壓比較電路。當Vdi大於基準電壓VH時,U3A輸出為正,接至PMM8713的第4腳,控制輸出端輸出正相脈衝序列。當Vdi小於基準電壓VH時,輸出端為負,接至PMM8713的第4腳,控制輸出端輸出負相脈衝序列,相應相驅動輸出端輸出正反向脈衝序列,從而控制步進電機的正反轉。
由LM331給出的輸入指令是輸入時鐘f0和方向指令DIR,這2個指令在PMM8713中經邏輯組合轉換各相通斷的時序邏輯信號。PMM8713的相驅動輸出端(PIN10~PIN13)的驅動電流達20 mA以上,能直接驅動微型步進電機。R1、C1為開機時自動初始化電路。初上電的數十毫秒內R端為低電平,從而A~D端自動複位至初始狀態。如果外接的步進電機功率較大,PMM8713輸出驅動端驅動能力不夠,此時應設計功率放大驅動電路,然後再驅動步進電機。PMM8713各相輸出端的導通順序邏輯信號送至功率驅動段轉換成內部功率開關的基極(或柵極)驅動信號。步進電機驅動方式按相繞組流過的電流是單向或雙向可分為單極性和雙極性驅動,通常,三相步進電飢採用單極性驅動。從功率驅動級電路來分析,又有電壓驅動和電流驅動之分。本設計中採用串聯電阻電壓驅動方式。在相繞組中串接一定阻值和功率的電阻,一方面減小了繞組迴路的時間常數,同時又對低頻和靜止工作時的電流進行限制。
利用上述原理設計了一個自動閘閥控制器,閘閥的上下位置採用限位開關控制,利用相應的電路使限位開關的動作改變圖5所示LM348比較電壓輸入端電壓的大小,從而控制步進電機運轉還是停轉。其工作原理;LM348的同相輸入端為基準電壓端,其反向輸入端為比較電壓輸入端,當比較電壓輸入端的電壓小於基準電壓時,LM348的1引腳上輸出高電平,使BD237導通,從而使步進電機能夠實現正轉或反轉;當比較電壓輸入端的電壓高於基準電壓時,在LM348的1引腳上輸出低電平,BD237截止,步進電機停轉。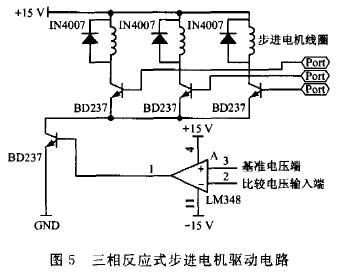
3 結語
本設計為步進電機驅動器的主體設計部分,結構簡單、成本低、性能穩定。採用該系統設計的三相反應式步進電機驅動器驅動55BF004型三相反應式步進電機。已成功地應用於自動閘閥控制系統中,運行效果良好。
[admin via 研發互助社區 ] 一種實用的三相步進電機驅動器的設計已經有2776次圍觀
http://cocdig.com/docs/show-post-44732.html
