一、 概述
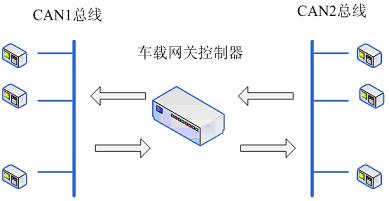
隨著汽車工業以及自動化程度的發展,現代汽車中所使用的電子控制系統和通訊系統越來越多,如發動機電控系統、 自動變速器控制系統、防抱死制動系統(ABS)、自動巡航系統(ACC)和車載多媒體系統等,這些系統之間。系統和汽車的顯示儀錶之間,系統和汽車故障診斷系統之間均需要進行數據交換,如此巨大的數據交換量,如仍然採用傳統數據交換的方法,即用導線進行點對點的連接的傳輸方式將是難以想象的,因此,用串列數據傳輸系統取而代之就成為必然的選擇。目前汽車上的電子部件越來越多,它們分別擔負著不同的作用並掛在不同的匯流排 - CAN匯流排上。CAN 是控制區域網絡(Control Area Network)的簡稱[/B],最早由德國BOSCH 公司推出,用於汽車內部測量與執行部件之間的數據通信。其匯流排規範已被ISO 國際標準組織制訂為國際標準。CAN 的信號傳輸採用短幀結構,每一幀的效位元組數為8 個,因而傳輸時間短,受干擾的概率低。當節點嚴重錯誤時,具有自動關閉的功能,以切斷該節點與匯流排的聯繫,使匯流排上的其他節點及其通信不受影響,具有較強的抗干擾能力。CAN 匯流排開始被用於汽車的電子系統通訊上起源於歐洲,它具有極強的抗干擾能力及糾錯能力。汽車在運行過程中,所屬電子部件之間需要進行通訊以交換實時數據,但是由於這些電子部件可能分別掛在不同的CAN匯流排上,而不同的CAN匯流排具有不同的數據傳輸速率,所以不同的CAN匯流排之間不能直接進行數據通訊,這就需要一個CAN匯流排網關控制器來進行協調高速CAN匯流排和低速CAN匯流排之間的通信。示意圖如下圖所示。
二、 硬體設計
1、 總體框圖
作為一個工業上應用的可靠CAN節點,看門狗、電源隔離和信號隔離是必要的,總體原理框圖如下:
2、 硬體原理圖
從以上可以看出,該硬體電路主要由三部分組成。
I、 處理器最小系統
處理器採用帶有兩路CAN介面的ARM7系列單片機 - LPC2119,該單片機內部有兩路CAN介面、32位處理器、內部匯流排結構為哈佛匯流排結構。如下圖所示:

複位電路主要採用採用專用複位晶元SP706以及數據緩衝晶元74HC125來構成,如下圖所示:

該電路具有按鍵複位、上電複位和低電壓複位功能。按鍵複位主要用於系統調試功能,經74HC125可以輸出兩路複位信號 - 系統複位信號和JTAG複位信號。
時鐘電路採用常用的無源晶振與微調電容組成。如圖所示。
程序燒寫口採用JTAG方式,比較方便在線調試。如圖所示。
II、 電源控制部分
本系統共需要四組電源:5V、3.3V、1.8V,另外還有CAN隔離電源(5V)。電源主晶元採用開關電源AP1509,其中5V電源是主電源,為其他各組電源提供輸入電源,由於汽車上只有DC12V電源,所以需要進行DC/DC轉換,電路如下: 
AP1509是一款寬輸入電壓範圍的DC/DC轉換器,輸入電壓可高達22V,輸出負載電流可高達2A。並且有可控輸入信號端SD,可以切斷或開啟該晶元的正常工作,以達到節電的目的。
本系統的處理器LPC2119需要兩組電源 - 3.3V和1.8V,其中1.8V為處理器的內核電源,3.3V為處理器的I/O電源,電路如下:
由於CAN匯流排現場的電磁干擾非常強,所以需要對CAN電源進行單獨隔離,避免干擾處理器的正常運行。主要就是採用一個隔離晶元,電路如下:
III、 CAN收發電路
該部分是系統的核心部分。共有兩路完全相同的電路分別掛在兩路CAN匯流排上。
電路如下: 
CAN電路部分與處理器部分需要通過光耦進行電氣隔離。採用了高速光耦晶元
TLP113。CAN收發器晶元採用TJA1050,該晶元的主要特點有:
● 高速 (高達 1 Mbaud)
● 至少可以連接110個節點
● 匯流排保護及終端保護功能
● 符合ISO 11898 標準
從上圖可以看出,在結構上,CAN收發器TJA1050左側連接系統處理器,右側連接CAN匯流排。實現了單片機對CAN匯流排數據的操作。
三、 軟體設計
CAN 是一種實時數據匯流排,它不需要給出信號接受者的地址,信號發送者將安全編碼后的數據發給所有的接受者。高速的CAN 匯流排每毫秒內可傳送32bytes 有效數據。每個信號接受者從匯流排上讀取其所需的數據。CAN匯流排數據的收發遵循CAN-BUS 2.0協議,運用到汽車上即為J1939協議。CAN-BUS 技術減少了線束的數量和控制器介面的引腳數,與此同時可以更簡單、迅速地實現在線編程、診斷,甚至多個控制器共同作用等新功能。 當停車發動機熄火時,CAN-BUS 的舒適型系統將自動處於休眠狀態,整個系統處於最低耗電狀態,從而節省能源的消耗。一旦接受到車門開啟等信號,無需發動機啟動,系統立即被喚醒而激活,開始接受各處節點傳遞的信息。本裝置主要負責兩條CAN匯流排上數據的互相轉發,並不對數據作任何改動或診斷,即全透明傳輸.設置高速CAN匯流排上的數據傳送速率為500K,低速CAN匯流排上的數據傳送速率為125K.汽車上的每個電子模塊均有CAN介面,以連接到CAN匯流排上.汽車運行時,所有電子模塊均通過各自的CAN介面向CAN匯流排發送系統實時數據,而需要CAN數據的模塊則從CAN匯流排接收數據,然後再作處理或診斷.軟體總體架構採用中斷結構,數據幀採用8位標準幀格式.該車載網關控制器的軟體流程圖如下:
主程序流程圖
中斷服務程序流程圖
四、 結語
經上車運行測試, 該車載網關控制器的丟包率僅為6%,為可接受範圍之內.
[admin via 研發互助社區 ] 一種汽車用CAN匯流排網關控制器的設計與研製已經有3696次圍觀
http://cocdig.com/docs/show-post-44639.html
