|
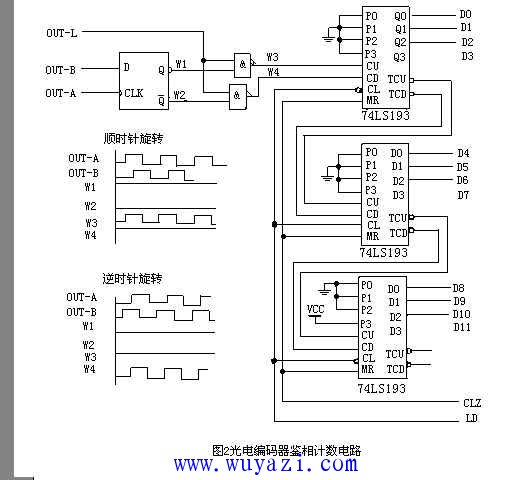
當光電編碼器順時針旋轉時,通道A輸出波形超前通道B輸出波形90°,D觸發器輸出Q(波形W1)為高電平,Q(波形W2)為低電平,上面與非門打開,計數脈衝通過(波形W3),送至雙向計數器74LS193的加脈衝輸入端CU,進行加法計數;此時,下面與非門關閉,其輸出為高電平(波形W4)。當光電編碼器逆時針旋轉時,通道A輸出波形比通道B輸出波形延遲90°,D觸發器輸出Q(波形W1)為低電平,Q(波形W2)為高電平,上面與非門關閉,其輸出為高電平(波形W3);此時,下面與非門打開,計數脈衝通過(波形W4),送至雙向計數器74LS193的減脈衝輸入端CD,進行減法計數。
汽車方向盤順時針和逆時針旋轉時,其最大旋轉角度均為兩圈半,選用解析度為360個脈衝/圈的編碼器,其最大輸出脈衝數為900個;實際使用的計數電路用3片74LS193組成,在系統上電初始化時,先對其進行複位(CLR信號),再將其初值設為800H,即2048(LD信號);如此,當方向盤順時針旋轉時,計數電路的輸出範圍為2048~2948,當方向盤逆時針旋轉時,計數電路的輸出範圍為2048~1148;計數電路的數據輸出D0~D11送至數據處理電路。
實際使用時,方向盤頻繁地進行順時針和逆時針轉動,由於存在量化誤差,工作較長一段時間后,方向盤迴中時計數電路輸出可能不是2048,而是有幾個字的偏差;為解決這一問題,我們增加了一個方向盤迴中檢測電路,系統工作后,數據處理電路在模擬器處於非操作狀態時,系統檢測回中檢測電路,若方向盤處於回中狀態,而計數電路的數據輸出不是2048,可對計數電路進行複位,並重新設置初值。
| 