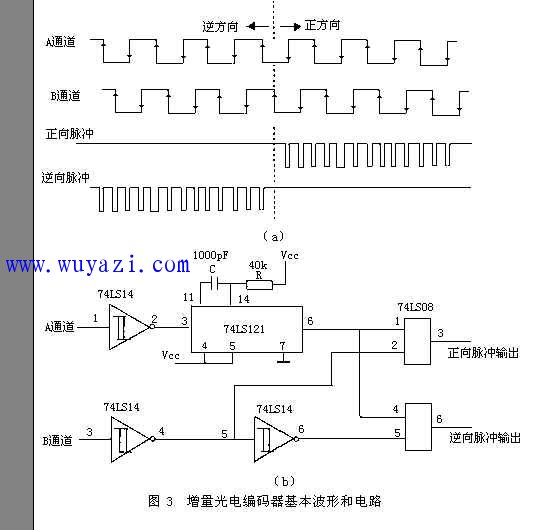
| 增量光電編碼器基本波形和電路
採用旋轉式光電編碼器,把它的轉軸與重力測量儀中補償旋鈕軸相連。重力測量儀中補償旋鈕的角位移量轉化為某種電信號量;旋轉式光電編碼器分兩種,絕對編碼器和增量編碼器。
增量編碼器是以脈衝形式輸出的感測器,其碼盤比絕對編碼器碼盤要簡單得多且解析度更高。一般只需要三條碼道,這裡的碼道實際上已不具有絕對編碼器碼道的意義,而是產生計數脈衝。它的碼盤的外道和中間道有數目相同均勻分佈的透光和不透光的扇形區(光柵),但是兩道扇區相互錯開半個區。當碼盤轉動時,它的輸出信號是相位差為90°的A相和B相脈衝信號以及只有一條透光狹縫的第三碼道所產生的脈衝信號(它作為碼盤的基準位置,給計數系統提供一個初始的零位信號)。從A,B兩個輸出信號的相位關係(超前或滯后)可判斷旋轉的方向。由圖3(a)可見,當碼盤正轉時,A道脈衝波形比B道超前π/2,而反轉時,A道脈衝比B道滯后π/2。圖3(b)是一實際電路,用A道整形波的下沿觸發單穩態產生的正脈衝與B道整形波相‘與’,當碼盤正轉時只有正向口脈衝輸出,反之,只有逆向口脈衝輸出。因此,增量編碼器是根據輸出脈衝源和脈衝計數來確定碼盤的轉動方向和相對角位移量。通常,若編碼器有N個(碼道)輸出信號,其相位差為π/ N,可計數脈衝為2N倍光柵數,現在N=2。圖3電路的缺點是有時會產生誤記脈衝造成誤差,這種情況出現在當某一道信號處於‘高’或‘低’電平狀態,而另一道信號正處於‘高’和 ‘低’之間的往返變化狀態,此時碼盤雖然未產生位移,但是會產生單方向的輸出脈衝。例如,碼盤發生抖動或手動對準位置時(下面可以看到,在重力儀測量時就會有這種情況)。
| 