| 超聲波測距系統的電路設計
一、引言
由於超聲波指向性強,能量消耗緩慢,在介質中傳播的距離較遠,因而超聲波經常用於距離的測量,如測距儀和物位測量儀等都可以通過超聲波來實現。利用超聲波檢測往往比較迅速、方便、計算簡單、易於做到實時控制,並且在測量精度方面能達到工業實用的要求,因此在移動機器人的研製上也得到了廣泛的應用。
為了使移動機器人能自動避障行走,就必須裝備測距系統,以使其及時獲取距障礙物的距離信息(距離和方向)。本文所介紹的三方向(前、左、右)超聲波測距系統,就是為機器人了解其前方、左側和右側的環境而提供一個運動距離信息。
二、 超聲波測距原理
1、 超聲波發生器
為了研究和利用超聲波,人們已經設計和製成了許多超聲波發生器。總體上講,超聲波發生器可以分為兩大類:一類是用電氣方式產生超聲波,一類是用機械方式產生超聲波。電氣方式包括壓電型、磁致伸縮型和電動型等;機械方式有加爾統笛、液哨和氣流旋笛等。它們所產生的超聲波的頻率、功率和聲波特性各不相同,因而用途也各不相同。目前較為常用的是壓電式超聲波發生器。
2、壓電式超聲波發生器原理
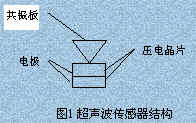
3、超聲波測距原理
超聲波發射器向某一方向發射超聲波,在發射時刻的同時開始計時,超聲波在空氣中傳播,途中碰到障礙物就立即返回來,超聲波接收器收到反射波就立即停止計時。超聲波在空氣中的傳播速度為340m/s,根據計時器記錄的時間t,就可以計算出發射點距障礙物的距離(s),即:s=340t/2
圖1 超聲波感測器結構
這就是所謂的時間差測距法。
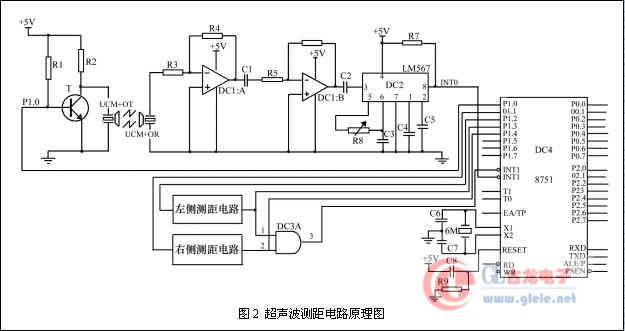
三、 超聲波測距系統的電路設計
本系統的特點是利用單片機控制超聲波的發射和對超聲波自發射至接收往返時間的計時,單片機選用8751,經濟易用,且片內有4K的ROM,便於編程。電路原理圖如圖2所示。其中只畫出前方測距電路的接線圖,左側和右側測距電路與前方測距電路相同,故省略之。
1、40kHz 脈衝的產生與超聲波發射
測距系統中的超聲波感測器採用UCM40的壓電陶瓷感測器,它的工作電壓是40kHz的脈衝信號,這由單片機執行下面程序來產生。
puzel: mov 14h, #12h;超聲波發射持續200ms
here: cpl p1.0 ;輸出40kHz方波
nop ;
nop ;
nop ;
djnz 14h,here;
ret
前方測距電路的輸入端接單片機P1.0埠,單片機執行上面的程序后,在P1.0 埠輸出一個40kHz的脈衝信號,經過三極體T放大,驅動超聲波發射頭UCM40T,發出40kHz的脈衝超聲波,且持續發射200ms。右側和左側測距電路的輸入端分別接P1.1和P1.2埠,工作原理與前方測距電路相同。
2、超聲波的接收與處理
接收頭採用與發射頭配對的UCM40R,將超聲波調製脈衝變為交變電壓信號,經運算放大器IC1A和IC1B兩極放大后加至IC2。IC2是帶有鎖定環的音頻解碼集成塊LM567,內部的壓控振蕩器的中心頻率f0=1/1.1R8C3,電容C4決定其鎖定帶寬。調節R8在發射的載頻上,則LM567輸入信號大於25mV,輸出端8腳由高電平躍變為低電平,作為中斷請求信號,送至單片機處理。
前方測距電路的輸出端接單片機INT0埠,中斷優先順序最高,左、右測距電路的輸出通過與門IC3A的輸出接單片機INT1埠,同時單片機P1.3和P1.4接到IC3A的輸入端,中斷源的識別由程序查詢來處理,中斷優先順序為先右後左。部分源程序如下:
receive1:push psw
push acc
clr ex1 ;關外部中斷1
jnb p1.1, right ;P1.1引腳為0,轉至右測距電路中斷服務程序
jnb p1.2, left ;P1.2引腳為0,轉至左測距電路中斷服務程序
return:SETB EX1;開外部中斷1 |
