步進電機具有快速啟停、精確定位的特點,在數字控制領域經常使用步進電機作為位置控制的執行機構.步進電機在快速運行中,要求驅動電路提供給步進電機繞組的驅動電流儘可能地接近其技術指標要求的數值,以產生足夠的轉矩.由於步進電機是感性負載,當運行速度提高后要提高繞組的工作電流,必須提高電源電壓.實際應用中,常採用的控制方式是高低壓恆流斬波控制.在筆者給西北軸承廠改造磨床的過程中,設計了一種實用的步進電機驅動電路,它可以驅動75BF003-130BF003四種型號的三相六拍反應式步進電機,最高運行頻率每分鐘15 000步.該電路除具有恆流斬波的特性外,還具有過流保護和超溫保護的功能.經過實際應用,表明電路的可靠性很高,從未發生由於電機故障而燒壞大功率管的問題,特推薦給大家.
1 電路的結構
電路(圖1)由速度判別電路,過流超溫檢測電路,A、B、C相驅動電路和電源組成.在該電路中,有單片機輸出的A相驅動信號(PA)、B相驅動信號(PB)、C相驅動信號(PC)和鎖相驅動信號(L),均為低電平有效.驅動步進電機的高壓電源採用AC70V整流濾波后供給,鎖相電源採用AC4.5 V半波整流后供給.另外,電路還需要的+12 V和+5 V直流電壓採用對AC10V和AC5V經過二極體整流濾波后獲得,數字電路所需要的電源通過板間介面J401由主機提供.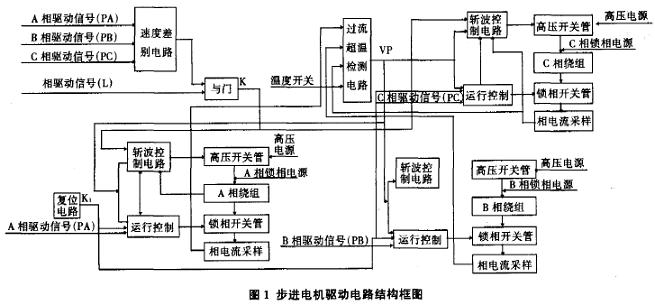
2 各部分電路介紹
2.1 速度判別電路
速度判別電路的核心是一片可重觸發單穩CD4538(圖2).當單片機控制步進電機運行時,首先將鎖相驅動信號L置為高電電平,隨後PA、PB、PC按照A→AB→B→BC→C→CA→A(或AC→C→BC→B→AB→A→AC)的順序依次輪流出現低電平,從而驅動步進電機一步一步地運行.由於在運行過程中,PA、PB和Pc信號至少有一個會出現跳變(上升沿或下降沿),而這種跳變經過由電阻和電容(如R470、C411、R471、R490和D431等)組成的微分電路變成一個負脈衝加到8輸入端與非門U409的輸入端,進而在其輸出端產生一個正脈衝觸發單穩U408A;U408A的輸出Q與鎖相驅動信號L經過由鍺開關二極體D473、D474構成的與門去控制A、B、C三相驅動電路的斬波電路.由於U408A的暫態時間大約是1 S,因此當步進電機的運行速度低於每秒鐘l步時,速度判別電路先輸出約1 S的高電平,使各相驅動電路進行約1 S的恆流斬波動作,使步進電機迅速到位,隨後轉到鎖相狀態(步進電機各相的電流降到其工作電流的大約一半),以降低步進電機的功耗.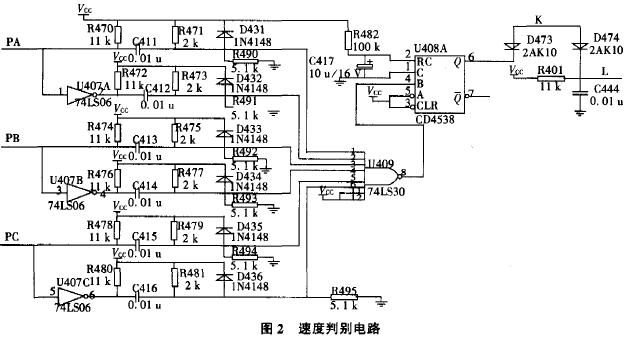
2.2 過流、超溫檢測電路
過流、超溫檢測電路的核心是由電壓比較器LM393(U403A)構成的施密特觸發器(圖3).在該電路中,鍺開關二極體D437-D440構成了1個或門,A、B、C三相電流檢測電阻上的電壓V1A、V1B 、V1C經過該或門加到施密特觸發器的輸入端(U403A的3腳).當這3個電壓中有任意一個超過U403A的2腳設定電壓+0.2 V(鍺二極體的正向壓降)時,由電壓比較器LM393構成的施密特觸發器翻轉,其輸出為高電平;這個高電平一方面通過D441的正反饋使其輸出維持為高電平,另一方面其輸出經過U407E反相(VP信號)將A、B、C相驅動電路的高壓開關管和鎖相開關管關斷,從而保護大功率三極體的安全.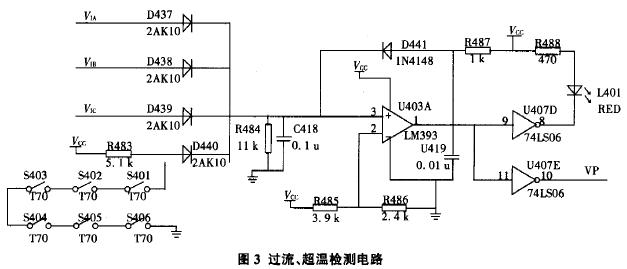
S401-S406為安裝在6個大功率管上的常閉溫度開關,其動作溫度為70℃.當6個功率管中的任意一個管殼溫度超過7O℃時,溫度開關斷開,高電平加到施密特觸發器的輸入端,從而使VP為低電平,將6個大功率管關斷,進而保護大功率三極體的安全.
該電路一旦翻轉,必須關閉電源才能夠恢復,這樣就避免了一旦外部條件恢復正常電路自動啟動,對操作工人產生傷害情況的發生.
2.3 各相繞組驅動電路
步進電機A、B、C三相繞組的驅動電路結構完全一樣,現以A相驅動電路為例介紹其工作原理.在圖4中,A和A'間接人步進電機的A相繞組,V1A是A相繞組取樣電阻上的電壓,該電壓的大小反映了A相繞組中電流的大小.R411和C401構成上電複位電路,當電路剛上電時,K1出現一個短暫的低電平,從而關閉鎖相開關管BG405,避免步進電機A、B、C三相同時通電情況的發生.T401為脈衝變壓器,採用Φ35 mm的鐵氧體磁罐製作.在這裡之所以將高壓開關管BG404的驅動採用變壓器耦合是為了避免前級驅動電路出現故障時,造成高壓開關管長期導通,進而燒毀現象的發生.大功率開關管BG404和BG405採用摩托羅拉公司生產的MJ13333,其耐壓400 V,IcM為20 A,PcM為175 W.75BF003-130BF003型步進電機的繞組電流為3~10 A,故選用MJ13333完全可以滿足需求.MJ13333上裝有指叉形散熱器,機箱中安裝4個軸流風扇解決系統的散熱問題.步進電機各繞組運行電流的調整可通過改變相電流取樣電阻R417和R419的阻值來實現.鎖相電流的改變通過調整鎖相電源的電壓來實現.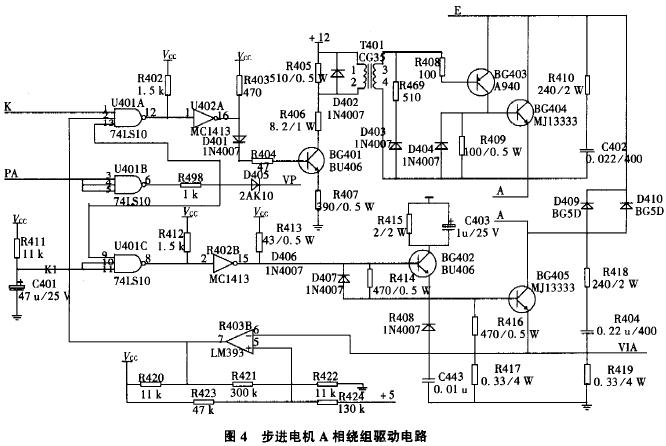
在正常工作中,K為高電平,當PA為低電平時表明A相繞組需要加電.這時,由於A相繞組中的電流為0,VIA的電壓也為0,由電壓比較器LM393(U403B)組成的施密特觸發器輸出高電平.同時由於PA為低電平,故三輸入與非f-j U401A和U401C的輸出為低電平,進而使鎖相開關管BG405和高壓開關管BG404導通,近100 V的直流電壓加到A相繞組上. 當A相繞組中的電流超過6 A(以110BF003三相六拍反應式步進電機為例),U403B輸出變為低電平,從而使高壓開關管BG404截止,這時A相繞組僅由鎖相電源提供電流,繞組中的電流開始下降,當A相電流下降使VIA的電壓小於U403B正輸入端(5腳)的電壓,高壓開關管BG404重新導通,100 V高壓重新將A相繞組的電流提高,如此反覆形成了恆流斬波的工作方式.在這裡,電阻R421的存在使U403B的狀態轉換產生一定的回差,避免了U403B的連續高速翻轉,改變R421的大小,可以改變斬波的頻率.
在鎖相狀態時,由於鎖相驅動信號L為低電平,K信號也為低電平,故而高壓開關管截止.若這時PA為低電平,則鎖相開關管BG405導通,A相繞組由AC4.5 V半波整流后的鎖相電源提供電流,此時繞組電流約為其工作電流的一半.這樣可以降低步進電機的功耗,進而減少電路和電機的發熱量.一旦出現繞組短路或高壓開關管擊穿的情況,VIA的電壓會迅速達到2.1 v(對應繞組電流約13 A),這時過流檢測電路會立即使VP為低電平,馬上使鎖相開關管截止,避免電路故障的進一步擴大,保護驅動電路和步進電機.在實際調試中,筆者曾將步進電機的繞組用導線短路,結果保護電路立即動作;關閉電源,拆除短路線后,重新接通電源,電路恢復正常工作.
3 結語
在該電路研製成功后,將其應用到西北軸承廠二十餘台經濟型磨床數控系統中,徹底解決了原來數控系統的步進電機驅動電源在夏季頻繁燒毀的問題.在長達三年的運行過程中,利用該電路作為步進電機驅動電源的數控系統從未發生由於超溫、過流而燒毀大功率管的情況.實驗證明,該電路是可靠的,可以在用微電腦技術改造老機床中推廣使用.
[admin via 研發互助社區 ] 一種實用的步進電機驅動電路已經有3300次圍觀
http://cocdig.com/docs/show-post-44733.html
