序言
一個多世紀以來,電動機作為機電能量轉換裝置,其應用範圍已遍及國民經濟的各個領域以及人們的日常生活中。其主要類型有同步電動機、非同步電動機和直流電動機三種。由於傳統的直流電動機均採用電刷以機械方法進行換向,因而存在相對的機械摩擦,由此帶來了雜訊、火化、無線電干擾以及壽命短等弱點,再加上製造成本高及維修困難等缺點,從而大大限制了它的應用範圍,致使目前工農業生產上大多數均採用三相非同步電動機。
針對上述傳統直流電動機的弊病,早在上世紀30年代就有人開始研製以電子換向代替電刷機械換向的直流無刷電動機。經過了幾十年的努力,直至上世紀60年代初終於實現了這一願望。上世紀70年代以來,隨著電力電子工業的飛速發展,許多高性能半導體功率器件,如GTR、MOSFET、IGBT、IPM等相繼出現,以及高性能永磁材料的問世,均為直流無刷電動機的廣泛應用奠定了堅實的基礎。
由於直流無刷電動機既具有交流電動機的結構簡單、運行可靠、維護方便等一系列優點,又具備直流電動機的運行效率高、無勵磁損耗以及調速性能好等諸多優點,故在當今國民經濟各領域應用日益普及。
三相直流無刷電動機的基本組成
直流無刷永磁電動機主要由電動機本體、位置感測器和電子開關線路三部分組成。其定子繞組一般製成多相(三相、四相、五相不等),轉子由永久磁鋼按一定極對數(2p=2,4,…)組成。圖1所示為三相兩極直流無刷電機結構,
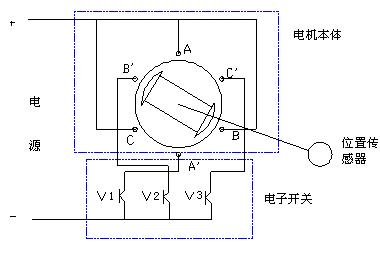
圖1 三相兩極直流無刷電機組成
三相定子繞組分別與電子開關線路中相應的功率開關器件聯結,A、B、C相繞組分別與功率開關管V1、V2、V3相接。位置感測器的跟蹤轉子與電動機轉軸相聯結。
當定子繞組的某一相通電時,該電流與轉子永久磁鋼的磁極所產生的磁場相互作用而產生轉矩,驅動轉子旋轉,再由位置感測器將轉子磁鋼位置變換成電信號,去控制電子開關線路,從而使定子各項繞組按一定次序導通,定子相電流隨轉子位置的變化而按一定的次序換相。由於電子開關線路的導通次序是與轉子轉角同步的,因而起到了機械換向器的換向作用。
圖2為三相直流無刷電動機半控橋電路原理圖。此處採用光電器件作為位置感測器,以三隻功率晶體管V1、V2和V3構成功率邏輯單元。
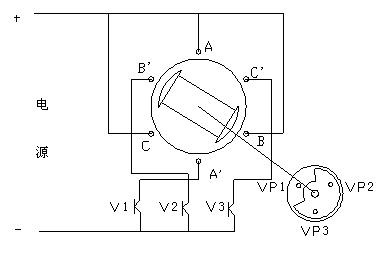
圖2 三相直流無刷電動機
三隻光電器件VP1、VP2和VP3的安裝位置各相差120度,均勻分佈在電動機一端。藉助安裝在電動機軸上的旋轉遮光板的作用,使從光源射來的光線一次照射在各個光電器件上,並依照某一光電器件是否被照射到光線來判斷轉子磁極的位置。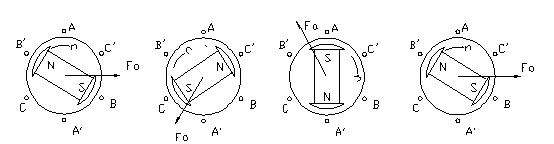
圖3 開關順序及定子磁場旋轉示意圖
圖2所示的轉子位置和圖3 a)所示的位置相對應。由於此時廣電器件VP1被光照射,從而使功率晶體V1呈導通狀態,電流流入繞組A-A’,該繞組電流同轉子磁極作用后所產生的轉矩使轉子的磁極按圖3中箭頭方向轉動。當轉子磁極轉到圖3 b)所示的位置時,直接裝在轉子軸上的旋轉遮光板亦跟著同步轉動,並遮住VP1而使VP2受光照射,從而使晶體管V1截至,晶體管V2導通,電流從繞組A-A’斷開而流入繞組B-B’,使得轉子磁極繼續朝箭頭方向轉動。當轉子磁極轉到圖3 c)所示的位置時,此時旋轉遮光板已經遮住VP2,使VP3被光照射,導致晶體管V2截至、晶體管V3導通,因而電流流入繞組C-C’,於是驅動轉子磁極繼續朝順時針方向旋轉並回到圖3 a)的位置。
這樣,隨著位置感測器轉子扇形片的轉動,定子繞組在位置感測器VP1、VP2、VP3的控制下,便一相一相地依次饋電,實現了各相繞組電流的換相。在換相過程中,定子各相繞組在工作氣隙內所形成的旋轉磁場是跳躍式的。這種旋轉磁場在360度電角度範圍內有三種磁狀態,每種磁狀態持續120度電角度。各相繞組電流與電動機轉子磁場的相互關係如圖3所示。圖3a)為第一種狀態,Fa為繞組A-A’通電后所產生的磁動勢。顯然,繞組電流與轉子磁場的相互作用,使轉子沿順時針方向旋轉;轉過120度電角度后,便進入第二狀態,這時繞組A-A’斷電,而B-B’隨之通電,即定子繞組所產生的磁場轉過了120度,如圖3 b)所示,電動機定子繼續沿順時針方向旋轉;再轉120度電角度,便進入第三狀態,這時繞組B-B’斷電,C-C’通電,定子繞組所產生的磁場又轉過了120度電角度,如圖3 c)所示;它繼續驅動轉子沿順時針方向轉過120度電角度后就恢復到初始狀態。圖4示出了各相繞組的導通順序的示意圖。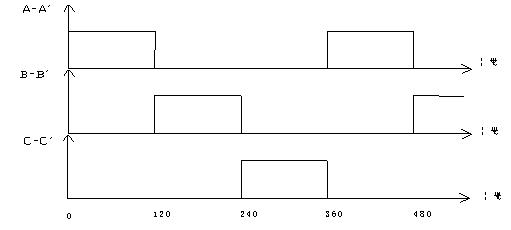
圖4 各相繞組的導通示意圖
位置感測器
位置感測器在直流無刷電動機中起著測定轉子磁極位置的作用,為邏輯開關電路提供正確的換相信息,即將轉子磁鋼磁極的位置信號轉換成電信號,然後去控制定子繞組換相。位置感測器種類較多,且各具特點。在直流無刷電動機中常見的位置感測器有以下幾種:電磁式位置感測器、光電式位置感測器、磁敏式位置接近感測器。
電磁式位置感測器在直流無刷電動機中,用得較多的是開口變壓器。用於三相直流無刷電動機的開口變壓器由定子和跟蹤轉子兩部分組成。定子一般有六個極,它們之間的間隔分別為60度,其中三個極上繞一次繞組,並相互串聯后通以高頻電源,另外三個極分別繞上二次繞組WA、WB、WC。它們之間分別相隔120度。跟蹤轉子是一個用非導磁材料做成的圓柱體,並在它上面鑲一塊120度的扇形導磁材料。在安裝時將它與電動機轉軸相聯,其位置對應於某一磁極。一次繞組所產生的高頻磁通通過跟蹤轉子上的到此材料耦合到二次繞組上,故在二次繞組上產生感應電壓,而另外兩相二次繞組由於無耦合迴路同一次繞組相聯,其感應電壓基本為零。隨著電動機轉子的轉動,扇形片也跟著旋轉,使之離開當前耦合一次繞組而向下一個一次繞組靠近。就這樣,隨著電動機轉子運動,在開口變壓器二次繞組上分別感應出電壓。扇形導磁片的角度一般略大於120度電角度,常採用130度電角度左右。在三相全控電路中,為了換相解碼器的需要,扇形導磁片的角度為180度電角度。同時,扇形導磁片的個數應同直流無刷電動機的極對數相等。
接近開關式位置感測器主要由諧振電路及扇形金屬轉子兩部分組成,當扇形金屬轉子接近震 盪迴路電感L時,使該電路的Q值下降,導致電路正反饋不足而停振,故輸出為零。扇形金屬轉子離開電感元件L時,電路的Q值開始上升,電路又重新起振,輸出高頻調製信號,經二極體檢波后,取出有用控制信號,去控制邏輯開關電路,以保證電動機正確換向。
光電式位置感測器前面已經講過,是利用光電效應製成的,由跟隨電動機轉子一起旋轉的遮光板和固定不動的光源及光電管等部件組成。
磁敏式位置感測器是指它的某些電參數按一定規律隨周圍磁場變化的半導體敏感元件。其基本原理為霍爾效應和磁阻效應。常見的磁敏感測器有霍爾元件或霍爾集成電路、磁敏電阻器及磁敏二極體等多種。
研究結果表明,在半導體薄片上產生的霍爾電動勢E可用下式表示:

式中 RH ——霍爾係數(  );
);
IH——控制電流(A);
B——磁感應強度(T);
d——薄片厚度(m);
p——材料電阻率(Ω*s);
u——材料遷移率( );
);
若在上式中各常數用KH表示,則有
E=KHIHB
霍爾元件產生的電動勢很低,直接應用很不方便,實際應用時採用霍爾集成電路。霍爾元件輸出電壓的極性隨磁場方向的變化而變化,直流無刷電動機的位置感測器選用開關型霍爾集成電路。
磁阻效應是指元件的電阻值隨磁感應強度而變化,根據磁阻效應製成的感測器叫磁阻電阻。
[admin via 研發互助社區 ] 直流無刷電動機原理與控制已經有7059次圍觀
http://cocdig.com/docs/show-post-44677.html
