LED千足蟲電路
Meandafriendarebothtryingtobuildamillipede.Becauseofobviousreasons,themillipedeisNOTgoingtohave1000feet!!!Instead,it'sgoingtohave16pagermotorsasfeet.Itwillalsohave3MicroMotorsto''bend''towardslight,andabackupsensor.FEATURES:-16PagerMotorsasfeet-3MicroMotorstoseeklight-PhotoTrophic-Obstacleavoidance-LooksCool!!!MECHANICS:Millipedeisdividedinfoursegments.Eachsegment(exceptthefirstone)isgluedtoaMicroMotorturnedupside-down.Themotorshaftisthengluedtothenextsegment.Eachsegmentcanrotateleft/rightandhas2PagerMotorsoneachside.Thisway,themillipedeshouldturntowardsthemostlightedarea.I'vecalculatedthatthewaistmotorsshouldturnonly30o-45oeverysecondorso.ThismeansthatIwillneedthemotorstobe7-15rpm.CandidatesforthisjobcanbetheLegoMicroMotor,SolarboticsGMorBabyGM(unlessIcangetsomeMU915LEscaps!!!).Weigthwasamajorconcernsincethewholebotwasimpulsedbypagermotors.Thewaistmotorsshouldweigthnomorethan70gandthebody(includingelectronics)isabout<100g.Actually,itseemsthat16pagermotorsaremorethanenoughtomovethebot!!!
ELECTRONICS:Imadeupthiscircuit,asthisismyfirst''big''BEAMcreationIhavenoideaifitworksproperly.Theupper3MsaretheLegoMicroMotorsandthelowerMsshouldbethe16PagerMotors.Ontheright,youcanseetheMicroMotorsdriver.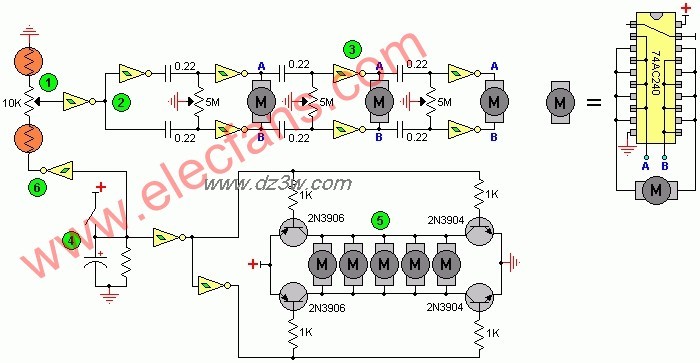
Hereistheexplanation:1Thisisthevoltagedivider.Itdividesvoltagedependingonwhichsideismoreiluminated,then,theschmittchangesthesignalfromawavetoastraightpulse.2The(usual)NvonlyworkswhentheinputreceivesaHIGH,andthatisthejoboftheschmitts.IfthefirstschmittoutputsaHIGHthethelowerstripofNvswillwork,theupperstripshouldstaycalmbecausethesecondschmittinvertsthesignaltoaLOW.ThanksMath!!!3Icannowbesurethattherewon'tbe2pulsesonasamemotor,andthatwhenthefirstmotorturnsleft(orright)thenextonewillalsoturnthatsameway,andthenextandthenext....Onlythefirstmotorisaffectedbylight,theothersfollow(inawavepattern)theonebeforethemselves.Sincethemillipedeismovingforwardwhileallthishappens,anicewaveshouldappearwhenthebothaslockedhispathtowardsthelightsource.4Thisisthebackupswitch.Whenthebotbumpsintosomethinglike...Hmm....anything,thecapisdischargedtroughtherightschmitt.The(nowLOW)outputoftheschmittwillreversethePagerMotors,thus,reversingthewholebot.5ThisisthePagerMotorsdriver.Itookthe4transistorcircuitdesignandmodifiedittobeusedwithonlyoneinputsignal.IknowIwon'tbeabletodrivethe16motorswith2N390Xtransistors,IusedthemintheschematiconlybecauseIneedtofindmorepowerfulones.ProbablyFETs?6Asanextra(Yupeee),whenthebotreversesitalsomakesthe''spinalcolumn''thinkthatlightisfullycommingonlyfromonedirection.Becauseofthis,whenthemillipedereverses,italsoturnstoonesideallthebody.Istillneedtoorderthecomponents(Let'sjustsaytherearenotmany74**14sor240sinCostaRica),sothefinalversionmaybedifferentthanthedrawings.I'malsothinkingaboutusingtheBabyGMsthatSolarboticssellinsteadoftheLegoMicroMotors.Ifyoucanhelpmewithanythingabouttheschematic,justemailme.
[admin via 研發互助社區 ] LED千足蟲電路已經有2100次圍觀
http://cocdig.com/docs/show-post-34082.html
